2019年度実験実績等
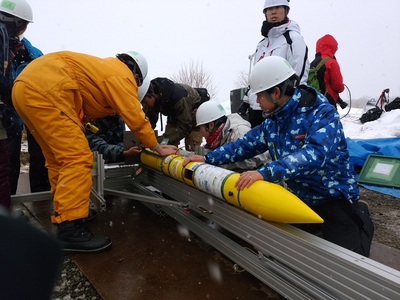
小型飛行ロボット自律飛行制御実験
- 実験団体:電気通信大学情報理工学部 田中研究室
- 実験期間:4月26日から5月9日、8月7日から27日
近年、災害発生時などの極限環境の中でも空からの活用が期待できる無人航空(Unmanned Aerial Vehicle)が注目されています。 同研究室では、スマートにミッションを遂行する自律飛行ロボット「スマート飛行体」の開発に関する研究を行っており、平成23年より大樹町で実験を行っております。
今年度も引き続き、低速・低高度でも安全に飛行可能な「パラグライダ型 UAV」、低コスト高パフォーマンスな「固定翼型 UAV」、ホバリング飛行が可能な「垂直離着陸無人機 VTOL」の3種類の機体を使用し、自動離着陸や改良したコントローラによる自動制御などの実験を行いました。


観測用ロケット「宇宙品質にシフト MOMO3号機」打上げ実験
- 実験団体:インターステラテクノロジズ株式会社
- 実験期間:4月30日、5月2日、4日
5月4日午前5時45分、多目的航空公園内に設置したパブリックビューイング会場で約1,317人の観客が見守るなか、カウントダウンとともに発射。発射後2分間のエンジン燃焼で高度40kmまで上昇し、打ち上げから約4分後には、国内では民間企業単独開発・製造したロケットとしては初となる高度100kmの宇宙空間に到達しました。

航空機運航支援システム開発のための飛行試験
- 実験団体:ナビコムアビエーション株式会社
- 実験期間:5月20日、7月22日から26日、9月17日から20日、10月5日、6日
7月から10月にかけて、GPSや衛星通信を利用した航空機運航支援システムを開発しているナビコムアビエーション株式会社が、モーターグライダーを使用した飛行実験を行いました。
同社は、集中管理型消防防災ヘリコプタ動態管理システム「D-NET」などの開発に携わっており、その機能のいくつかを民間技術移転により実装した航空機運航支援システムを開発しています。今年度は、新たに航空機だけでなく車両の動態も把握できるように開発したシステムの有効性や操作性を確認するため、モーターグライダーを使用した実証実験を行いました。
太陽電池装備無人航空機の飛行試験
- 実験団体:JAXA×スカパーJSAT×東海大学
- 実験期間:8月18日から24日、9月21日から27日
国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の公募事業「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」を受託し、3機関が共同で研究・開発を進めている「衛星通信を利用するドローンの運航管理システム」を搭載した無人航空機の飛行試験を行いました。
大気球実験
- 実験団体:JAXA 大気球実験グループ
- 実験期間: 6月18日から8月10日
今年度の大気球実験では、「成層圏における微生物捕獲実験 Biopause3」と「極薄ペロブスカイト太陽電池の気球飛翔」が行われ、どちらの実験も無事終了し、海上に着水した大気球は、大樹町の漁業者のみなさんの協力を得て回収されました。
また、当初予定されていた「マルチクロックトレーサーによる大気年代の高精度化」は、気球飛翔に必要なヘリウムガスが国内での供給不足により十分な量を確保することができず実施が見送りとなりました。

観測ロケット「ペイターズドリーム MOMO4号機」打上げ実験
- 実験団体:インターステラテクノロジズ株式会社
- 実験期間:7月20日、27日
多目的航空公園内に設置したパブリックビューイング会場で約800人の観客が見守るなか、午後4時20分に打ち上げられたMOMO4号機は、エンジンの噴射音を響かせながら上昇していき、雲の中に入るまでの間、パブリックビューイング会場からもはっきりと目視することができました。
しかし、発射後約64.3秒後に機体搭載されたコンピュータが異常を感知し、エンジンを自動で緊急停止したため、連続での宇宙空間到達はかないませんでした。原因として、当日の気象条件由来の静電気や雷等による搭載機器の故障や機体内部の振動等の過酷な環境においてケーブル・コネクタ脱落による電源等の切断が疑われ、5号機に向けて改善が行われました。

警戒監視能力向上実験
- 実験団体:防衛装備庁航空装備研究所
- 実験期間:10月10日から11月2日
エラーマネジメント技術の研究・状況認識支援技術の研究
- 実験団体:JAXA 航空技術部門
- 実験期間:10月19日から11月7日

小型無人機の安全性・運用性向上技術の研究
- 実験団体:JAXA 航空技術部門
- 実験期間:11月11日から22日
ヘリコプタの安全性・利便性向上
- 実験団体: JAXA 航空技術部門
- 実験期間:10月28日から11月1日
小型超音速実験機関連実験
- 実験団体:室蘭工業大学
- 実験期間:11月16日、17日、12月1日から7日
観測ロケット「MOMO5号機」打上げ実験
- 実験団体:インターステラテクノロジズ株式会社
- 実験期間:12月29日から1月3日
今回、トラブルが発生したのは、機体内の電子機器を結ぶ通信経路で、液体酸素充填中に飛行中の姿勢制御等に使われている通信系統にエラーが検出され、飛行の安全に影響が及ぶ可能性があることや電子機器自体にもトラブルの恐れがあったため打上げの延期を決定しました。
2018年度実験実績等
低融点熱可塑性固体推進薬(LTP)ロケット飛行実証試験
- 実験団体:株式会社植松電機
- 実験期間:3月7日午前11時00分
株式会社植松電機とJAXA、北海道宇宙科学技術創成センターが共同で開発する低融点熱可塑性固体推進薬(LTP)を用いたロケットの打ち上げ実証実験が行われました。
LTPとは、従来の固体ロケット推進薬とは違い、チョコレートのように再成型が可能で、モーターケースへの再充填や残った推進薬を再利用することができるほか、小規模な製造施設での少量連続製造・保管が可能なため、抜本的な製造コストの低下が期待されています。
打ち上げられたロケットは全長約2m、重量13kgで、打ち上げから16秒後に高度818mまで到達し、パラシュートを展開、機体は無事回収され、実験は成功に終わりました。



観測用ロケット「MOMO」3号機エンジン統合燃焼実験
- 実験団体:インターステラテクノロジズ株式会社
- 実験期間:12月28日、1月12日、3月1日
今回の実験は、実験用の機体を立てて固定した状態で行う「縦吹き」で、高度100kmを目指す打上げ実験時と同様の120秒間の燃焼に成功しました。
統合燃焼実験は、12月28日に初めて2秒間の燃焼実験を行い、1月の燃焼実験では、エンジン点火後の機体制御を含めた推進系の動作確認を行いました。
3回目となる3月の燃焼実験では、ロケットの先端部「ノーズコーン」も取り付け、搭載した電子機器の振動データを取得した。3号機関連の大きな実験は今回で最後となります。
機体は現在制作中で、今春の打上げを目指して順調に開発が進んでいます。


室蘭工業大学 飛行機模型にはたらく空気力の計測実験
- 実験団体:室蘭工業大学
- 実験期間:11月28日から12月2日
室蘭工業大学航空宇宙システム研究センターで研究・開発中の小型超音速無人実験機「オオワシ2号」の縮小機体(翼長0.8m、全長2.4m)による、「機体にはたらく空気力測定実験」および「滑走・離陸試験」が実施されました。
機体にはたらく空気力測定実験では、ワゴン車の屋根上にオオワシ2号縮小機体を設置し、滑走路上を走行して機体にはたらく空気力の計測を行いました。
また、滑走・離陸試験では、オオワシ2号縮小機体を滑走路上で自走させ、走行安定性の検証を行いました。
オオワシ2号は、大気中を高速で飛行するための基盤技術を研究・開発し、それらの技術を飛翔体システムとして飛行実証することを目的として開発されており、2020年の初飛行に向けて機体の開発中です。



小型無人機の安全性・運営性向上技術の研究
- 実験団体:JAXA航空技術部門
- 実験期間:6月4日から6月15日、11月14日から11月24日
放射線モニタリング無人機システム(UARMS)と航空機搭載映像レーダ(SAR)を搭載した小型無人飛行機(UASAR)の安全性・運用性の向上を図るため、飛行試験による評価およびデータ収集が行われました。
エラーマネジメント技術の研究・状況認識支援技術の研究
- 実験団体:JAXA航空技術部門
- 実験期間:11月2日から11月15日
JAXA航空技術部門では、ヘリコプターを使った災害救援や捜索救助を、夜間や悪天候時にも安全に実施できるようにするため、コクピットやヘルメットのバイザにわたかりやすく飛行情報を見せる技術「SAVER」を開発しています。
航空機運航支援システム開発のための飛行試験
- 実験団体:ナビコムアビエーション株式会社
- 実験期間:7月22日から7月25日、9月8日から9月14日、10月22日
7月から10月にかけて、GPSや衛星通信を利用した航空機運航支援システムを開発しているナビコムアビエーション株式会社が、モーターグライダーを利用した飛行実験を行いました。
昨年度、町が実施した宇宙関連企業を誘致するモニターツアーに参加していただき、同ツアー参加企業では初の実験利用となりました。
同社は、総務省消防庁が導入している集中管理型消防防災ヘリコプター動態管理システム「D−NET」などを開発しており、今回は、現在開発中の新機能を備えたシステムの有効性や操作性を確認するため、モーターグライダーを用いての実証実験を行いました。


無人航空機の飛行試験
- 実験団体:株式会社テラ・ラボ
- 実験期間:8月27日から8月31日
中部大学発のベンチャー企業、株式会社テラ・ラボが開発中の長距離飛行が可能な小型無人航空機の飛行実験を行いました。
同社は、災害発生直後に上空から迅速かつ長時間にわたり被害状況をリアルタイムで確認できる無人航空機の開発をしており、今回は実用化を目指した航続距離100kmの飛行試験のほか、市販されている無人航空機(ドローン)の高度1000mの高高度飛行と空撮試験を行いました。


小型飛行ロボットの自律飛行制御実験
- 実験団体:電気通信大学 情報理工学研究科 機械知能システム学専攻 田中研究室
- 実験期間:4月28日から5月8日、8月8日から8月17日
近年、災害発生時などの極限環境の中でも空からの活用が期待できる無人航空機(Unmanned Aerial Vehicle)が注目されています。同研究室では、スマートにミッションを遂行する自律飛行ロボット「スマート飛行体」の開発に関する研究を行っており、平成23年より大樹町で実験を行っております。
現在、田中研究室では、低速・低高度でも安全に飛行可能な「パラグライダ型UAV」、低コスト高パフォーマンスな「固定翼型UAV」、ホバリング飛行が可能な「垂直離着陸無人機VTOL」の3種類の機体を開発中です。今回の実験では、各機体の動作確認と飛行データの収集を行いました。


大気球実験
- 実験団体:JAXA宇宙科学研究所
- 実験期間:6月18日から8月10日
今年の大気球実験は、「気球VLBI(超長基線電波干渉計)実験」、「皮膜に網をかぶせたスーパープレッシャー気球の性能評価」、「成層圏における微生物捕獲実験」、「マルチクロックトレーサーによる大気年代の高精度化」の4実験を予定しておりましたが、期間中、気球の放球・飛翔に適さない気象が継続したため、4実験全て実施することができませんでした。
観測用ロケット「MOMO」2号機打上げ実験
- 実験団体:インターステラテクノロジズ株式会社
- 実験期間:6月30日午前5時30分
インターステラテクノロジズ株式会社(IST)による観測ロケット「MOMO」2号機の打上げ実験が6月30日に実施されました。MOMOは全長9.9m、直径0.5mで民間企業単独では国内発の宇宙空間(高度100km)を目指して打ち上げられました。打上げ実験は平成29年7月30日に続き2回目となります。
午前5時30分、多目的航空公園内に設置したパブリックビューイング会場で約700人の観客が見守るなか、カウントダウンとともに発射。離昇の4秒後、高度20mまで上昇したところで推力が途絶し、機体は落下、爆発しました。
ISTの発表によると、爆発後、機体は炎上しましたが、大部分は射場のコンクリート部分に残留しており、一部が周囲に飛散したものの、海や河川には到達せず、飛散物もIST職員により回収されました。
また、この爆発によるけが人はいませんでした。



災害対策用無線中継システム実証実験
- 実験団体:ソフトバンク株式会社
- 実験期間:4月19日から4月25日
複数の移動通信事業者の電波を同時に無線中継する機能を搭載するドローンを使用した実証実験が行われました。
この実験では、携帯電話やスマートフォンの位置情報サービスを複数の移動通信事業者の電波を同時に無線中継する機能を開発し、ドローンに搭載した無線中継システムを介して、それぞれの移動通信事業者のスマホとデータ送受信を可能とすることで、雪山に埋もれたスマホのGPS機能で取得した位置情報を捜索側のパソコンやタブレット等に通知し、遭難者が加入する移動通信事業者に依存することなくスマホの位置を特定できることを実証しました。
2017年度実験実績等
ハイブリッドロケット打上げ実験
- 実 験 日:平成30年2月28日(水)から3月7日(水)
- 実験団体:東海大学学生ロケットプロジェクト
東海大学学生ロケットプロジェクト(TSRP)がロケット打上げ実験を行うため、2月28日から3月7日の間、大樹町に滞在しました。TSRPは東海大学の学生団体の1つで、大樹町では2004年からほぼ毎年打上げ実験を行っています。ロケットの設計、製造、組み立て、打上げといった全工程を学生が行っており、卒業生には町内企業のインターステラテクノロジズ株式会社に就職し、ロケット開発で培った経験を活かして活躍している方もいます。
今回は過去最多の42人が2月28日に現地入りし、3月3日から6日の間に1機のロケットを打ち上げる予定でした。ロケットは固体燃料(ワックス燃料)と液体酸化剤(亜酸化窒素)を使用するハイブリッドロケットで、全長1.752 m、重さ13.48 kg、予想到達高度840 mでした。今後のロケット大型化に向け、今まで既製品を使用していたタンクを初めて自作したほか、新たな試みとして広報企画「ゆめロケ!」を展開し、ロケットに全国の小学生が描いた「将来の夢」のイラスト115枚が貼り付けられました。
3日と4日は暴風雪による準備の遅れや強風などのため打上げを延期し、5日と6日に打上げを試みましたが、数回の技術的なトラブルを繰り返すうちに酸化剤が尽きてしまったため、打上げを断念しました。学生実験責任者の林さんは「今回は子どもたちの期待もあり、また大樹町の方々には除雪や食事、実験準備等で大変お世話になっていたので、何とか打ち上げたかったが残念でした。期待に不備は無いので、作業の手順や方法を検討して、できれば大樹町でリベンジしたいです。」と話しました。

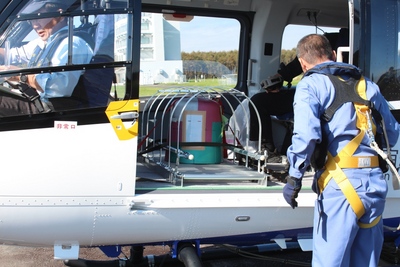
宇宙ステーション補給機「こうのとり」搭載小型回収カプセル高空落下試験(2)
- 実 験 日:平成29年11月16日(木)
- 実験団体:JAXA有人宇宙技術部門
JAXAでは、国際宇宙ステーションで得られた実験成果を地球へ持ち帰るための小型回収カプセルの開発を進めており、これまでにその試験を大樹町で3度(一昨年10月、昨年9月、今年7月)行っています。今年7月に行われた試験では、不具合によりメインパラシュートが開かなかったため、JAXAでは原因を究明して修理を施し、その再試験を11月16日に実施しました。
実験で使用された模擬カプセルは直径84 cm、高さ70 cm、重さ190 kgの円錐形で、中にはタイガー魔法瓶(大阪府門間市)が製作した容積15リットルの容器が入っています。16日はヘリコプタで模擬カプセルを吊り下げ、大樹沖約7 kmの海上に移動し、高度1.5 kmから模擬カプセルを投下しました。JAXAの担当者は「計画通りパラシュートが開き、良い結果だった。」と話しました。
JAXAでは、今年度末に打上げ予定の「こうのとり7号機」のミッションで、実際にこの回収カプセルに国際宇宙ステーションで得られた実験成果を積んで大気圏に突入させる予定です。

無人機搭載SARのリピートパスインターフェロメトリMTIに係る研究の飛行試験(2)
- 実 験 日:平成29年11月10日(金)から11月19日(火)
- 実験団体:JAXA航空技術部門、東京電機大学
JAXAでは東京電機大学と連携して、合成開口レーダー(synthetic aperture radar;SAR)というレーダーを搭載した2機の無人機を、時間差をつけて同じ経路を飛行させ、得られたデータを比較する事で、地上の構造物や地上を低速で移動する物体の動きを観測する技術の開発を行っています。この方法は、従来の有人飛行機や人工衛星による観測では難しい秒速数cmの動きにも対応でき、将来的には自然災害等の防災面での活用が期待されています。
今回の実験では、本年9月に行った実験を発展させ、2機の機体を協調させて同時に飛行させる実験が行われました。

放射線モニタリング無人機システム(URAMS)の飛行実験
- 実 験 日:平成29年10月23日(月)から11月3日(金)
- 実験団体:日本原子力研究開発機構、JAXA航空技術部門
放射線モニタリングとは、大気中や地上の放射線量を観測することで、それを無人航空機で上空から行う技術が「放射線モニタリング無人機システム(Unmanned Airplane for Radiation Monitoring System;URAMS)」です。有人機を使用した放射線量の観測よりも「コストが低い」「被爆リスクが低い」「低高度で観測可能」といったメリットがあります。多目的航空公園ではこれまでもUARMSの飛行実験が数回行われており、今回の実験では主に、機能向上を図った機体の機能確認を目的として実験が行われました。
無人機搭載SARのリピートパスインターフェロメトリMTIに係る研究の飛行試験(1)
- 実 験 日:平成29年9月1日(金)から9月7日(木)
- 実験団体:JAXA航空技術部門、東京電機大学
JAXAでは東京電機大学と連携して、合成開口レーダー(synthetic aperture radar;SAR)というレーダーを搭載した2機の無人機を、時間差をつけて同じ経路を飛行させ、得られたデータを比較する事で、地上の構造物や地上を低速で移動する物体の動きを観測する技術の開発を行っています。この方法は、従来の有人飛行機や人工衛星による観測では難しい秒速数cmの動きにも対応でき、将来的には自然災害等の防災面での活用が期待されています。
大樹町では、2015年度から試験が行われており、3年目の今年は、100から300mの一定間隔で飛行するようにプログラムした2機の同時飛行を目指します。今回は1機での飛行を十数回繰り返し行い、無人機の確認試験を行いました。今後、11月にも大樹町で2機の機体を協調させて飛行させる試験を予定しています。
飛行ロボットの自律飛行制御実験
- 実 験 日:平成29年8月7日(月)から8月25日(金)
- 実験団体:電気通信大学田中研究室
今年、4月から5月にかけて実験を行った電気通信大学 田中研究室が、それらの実験を踏まえて機体を改良し、再度実験を行いました。
今回は固定翼型・パラグライダー型の飛行ロボットに加えて垂直離着陸無人機(VTOL)の試験も実施されました。詳細な実験内容は電気通信大学田中研究室ホームページに記載されていますので是非ご覧ください。<ホームページはこちらをクリック>

観測ロケット「MOMO」打ち上げ実験
- 実 験 日:平成29年7月30日(日)
- 実験団体:インターステラテクノロジズ株式会社
- 実験内容:観測ロケット「MOMO(モモ)」打上げ実験
インターステラテクノロジズ(IST)社による観測ロケット「MOMO(モモ)」打ち上げ実験が7月30日に実施されました。MOMOは、全長9.9 m、直径0.5 mで、一般的に宇宙空間とされる高度100 kmを目指して打ち上げられました。
午後4時31分、多目的航空公園内に設置したパブリックビューイング会場で約700人の観客が見守る中、MOMOは辺り一帯に「ゴゴゴ…」という轟音を響かせながら浜大樹の実験場から東南東の太平洋に向かって打ち上げられました。しかし、打ち上げから約66秒後、MOMOと地上との通信が途切れたため、エンジンを緊急停止させて飛行を中止させました。MOMOは推定高度20 kmに到達後、大樹町沖合約6.5 kmの海上に落下しました。
IST社の稲川社長は「目標の宇宙には到達しなかったが、多くの成果が得られ、今後のロケット開発に向けて大きな前進となった。今後、後継機「MOMO2」の開発や、数年後までに小型人工衛星の打ち上げを目指しロケット開発を進めていく。」と話しました。


写真左:MOMO打ち上げ時、写真右:パブリックビューイング会場
宇宙ステーション補給機「こうのとり」搭載型小型回収カプセル高空落下試験(1)
- 実 験 日:平成29年7月22日(土)
- 実験団体:JAXA有人宇宙技術部門
- 実験内容:「こうのとり」搭載型小型回収カプセル高空落下試験
国際宇宙ステーション(ISS)では宇宙環境を利用した様々な実験が行われています。しかし、その貴重な実験の成果を地球に持ち帰る機会は限られた回数しかありません。そこでJAXAでは、その実験成果の回収頻度をあげ、ISS利用成果の最大化に資するため、ISSへ物資を運ぶ「こうのとり」に「小型回収カプセル」を搭載し、その「カプセル」に実験成果を乗せて地球へ帰還させる、という技術の開発が進められており、一昨年10月、昨年9月に引き続き、今年も大樹町でその実験が行われました。
早朝の雨も上がり、予定通り供試体のカプセルをヘリコプタに吊り下げ、沖合い約8 kmの海上に移動、高度2 kmから供試体を落下させる実験が行われました。大樹漁協の漁船2隻により供試体が回収されて実験は終了し、今後、JAXAにより分析が行われます。

JAXA大気球実験(2)
- 実 験 日:平成29年6月24日(土)
- 実験団体:JAXA大気球実験グループ
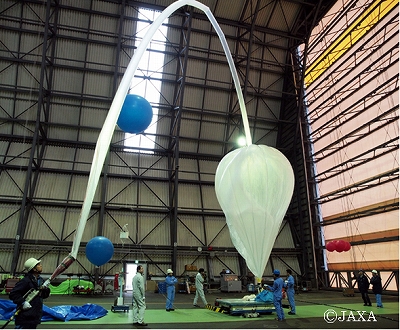
JAXA大気球実験グループは6月24日(土)に、大樹航空実験場(大樹町多目的航空公園内)から満膨張体積5,000 m3(直径23 m)の大気球を放球し、気球の強度を高めるロードテープという部材を新型にして問題なく運用できるかを確認するための試験を行いました。
気球は、24日午前3時33分に放球され、放球後1時間30分後に大気航空宇宙実験場東方約50 kmの太平洋上において高度24 kmで水平浮遊状態に入りました。その後、午前6時9分に指令電波により切り離された気球と制御機器部は、大気航空宇宙実験場南東約20 kmの海上に着水し、回収船によって回収されました。JAXA大気球実験グループ長の吉田グループ長は「地上の風も穏やかで実験はうまくいった。気球は通常よりガスを増やして負荷をかけたが問題なく運用できた」と話しました。
<参考>
気球の縦方向(経線方向)には、ロードテープという気球の骨格の役割を果たすテープが複数本挿入されています。高度30 km以上の成層圏を飛翔する大気球の製作において、気球に実験装置を吊り下げるためには強度が強く伸びのないロードテープが必要で、これまでは外国製の製品を使用していました。今回はより軽い国産品として新規開発されたロードテープを使用した大気球の飛翔性能試験が行われました。
JAXA大気球実験(1)
- 実 験 日:平成29年6月23日(金)
- 実験団体:JAXA大気球実験グループ・千葉工業大学
成層圏における微生物捕獲を目的として、JAXA大気球実験グループにより大樹航空実験場(大樹町多目的航空公園内)から満膨張体積30,000 m3(直径42 m)の大気球が放球されました。微生物捕獲実験は昨年度に引き続き2回目で、今回は採取機器を複数搭載しての実験でした。
気球は23日午前4時48分に放球され、放球後1時間30分後に大樹航空実験場東南東約40 kmの太平洋上において高度28 kmで水平浮遊状態に入りました。その後、午前6時50分に指令電波により切り離された気球と微生物採取装置は、大樹航空宇宙実験場南東約15 kmの海上に着水し、午前7時40分に回収船によって回収されました。今回の実験でも、回収船は大樹町の漁業者の皆さんの協力を得て運行されました。JAXA大気球実験では、地元漁業者の皆さんや、実験の準備などにおいては地元住民の方々が協力しており、JAXAと地元住民が一体となって取り組みを進めている実験の一つです。
実験では、採集装置の作動、海上での回収について、トラブルもなく終了しました。現在、千葉工業大学では、採取した微生物試料の分析を行っています。
<参考>
成層圏における微生物の存在は、これまでにも地球大気の上部(成層圏、中間圏)での微生物採取により数例報告されています。大気上部に存在する生物種の把握や、その分布を明らかにすることは、地球生物圏の上端がどのようになっているのかを知る上で非常に重要な知見となります。今回の実験では、気球から切り離された微生物採集装置がパラシュートにより降下する間の微生物採取を目的としています。


重力天体着陸FTBの離着陸試験
- 実 験 日:平成29年5月11日(木)から5月17日(水)
- 実験団体:JAXA研究開発部門
JAXA研究開発部門による「重力天体着陸FTB(=flying test bed;飛行実験機)の離着陸試験」が行われました。将来の月惑星探査の実現に必要となる、月や火星などの重力天体に定点着陸するための技術を高度化することを目的とし、今回はFTBを短時間離床させ、基本的な離着陸機能の検証を行いました。

飛行ロボットの自律飛行制御実験
- 実 験 日:平成29年4月28日(金)から5月9日(火)
- 実験団体:電気通信大学 田中研究室
最近、災害などの極限環境の中でも空からの活躍が期待できる無人航空機(Unmanned Aerial Vehicle : UAV)が注目されています。電気通信大学の田中研究室ではスマート飛行体(スマートにミッションを遂行する自律飛行ロボット)の開発・研究を行っており、これまでも大樹町で実験を繰返していて、自動での離着陸や予め設定した地点の撮影などに成功しています。
現在、田中研究室では、低速・低高度でも安全に飛行可能な「パラグライダー型UAV」(写真左)と、低コスト高パフォーマンスな「固定翼型UAV」(写真右)の2種類の機体を開発中です。
今回、パラグライダー型UAVでは搭載カメラを利用した滑走路自動認識による自動着陸の予備実験を行いました。この実験は、飛行ロボットが自分で着陸場所を選定し、未知の場所での着陸場所選定から着陸動作までの完全自動化を目指しています。
また固定翼型UAVでは、最適制御による飛行軌道実験を行い、その飛行性能を確認し、安定性に優れた飛行を実現できました。また同時に、詳細な飛行ダイナミクス構築のための飛行データ収集を行いました。
電気通信大学 田中研究室では、今回の実験で得られたデータを大学に持ち帰り、データの検証を行い、今年の秋にも再び大樹町で実験を行いたいと話していました。


2016年度実験実績等
ハイブリッドロケットの打上げ実験(東海大学)
- 実 験 日:平成29年2月27日(月)から3月7日(火)
- 実験機関:東海大学学生ロケットプロジェクト
東海大学学生ロケットプロジェクトは、手作りで低価格なロケット開発の場を学生に提供する事で、学生が机上では学べない宇宙理工学の知識・技術を修得させ、将来の宇宙技術者を養成することを目的として1995年に設立されました。大樹町では、2004年からほぼ毎年、自作のハイブリッドロケットの打上げを大樹町で実施しています。
今回は2月27日から打上げ準備を始め、3月2日にロケットを1機打ち上げました。今回打上げたロケット(44号機)は、全長1.5 m、直径154 mm、重量5.8 kgで、燃料にワックス燃料、酸化剤に亜酸化窒素を使用しているハイブリッドロケットです。44号機は高度1000 m以下の低高度実験のために開発された機体で、設計の簡略化・分離機構セッティング時間の短縮・超小型超軽量のバルブシステムといった、扱いやすさを重視した特徴があります。
ロケットは予定通り打ち上げられ、高度約300 mまで到達した後、パラシュートが展開され、無事に回収されました。今後は、今回得られた各種データを解析し、当面の目標としている高度10 kmへの打上げを目指し開発を進めていくようです。



無人機搭載SARのリピートパスインターフェロメトリMTIに係る研究の飛行実験(2)
- 実 験 日:平成28年11月16日(水)から11月25日(金)
- 実験機関:JAXA航空技術部門、東京電機大学
JAXAでは東京電機大学と連携して、合成開口レーダー(synthetic aperture radar;SAR)というレーダーを搭載した2機の無人機を、時間差をつけて同じ経路を飛行させ、得られたデータを比較する事で、地上の構造物や地上を低速で移動する物体の動きを観測する技術の開発を行っています。この方法は、従来の有人飛行機や人工衛星による観測では難しい秒速数cmの動きにも対応でき、将来的には自然災害等の防災面での活用が期待されています。
今回の実験では、本年10月に行った実験を発展させ、小型無人機に搭載したSARによる高度500 mからのデータ取得に成功したほか、2機の機体を連動させる動作確認試験が行われました。
この実験は来年も航空公園での実験を計画しており、2機を協調させて同時に飛行させる実験や、その状態でSARによるデータ取得実験を計画しています。
放射線モニタリング無人機システム(UARMS)の飛行実験
- 実 験 日:平成28年10月30日(日)から11月6日(日)
- 実験機関:日本原子力研究開発機構、JAXA航空技術部門
放射線モニタリングとは、大気中や地上の放射線量を観測することで、それを無人航空機で上空から行う技術が「放射線モニタリング無人機システム(Unmanned Airplane for Radiation Monitoring System;URAMS)」です。有人機を使用した放射線量の観測よりも「コストが低い」「被爆リスクが低い」「低高度で観測可能」といったメリットがあります。多目的航空公園ではこれまでもUARMSの飛行実験が数回行われており、今回の実験では主に、機能向上を図った機体の機能確認を目的として実験が行われました。
固定翼小型無人飛行機の自動操縦飛行実験
- 実 験 日:平成28年10月19日(水)から24日(月)
- 実験機関:ゼノクロス航空宇宙システム、X-TREME COMPOSITE JAPAN
ゼノクロス航空宇宙システムは、無人飛行機のほか無人自動車、無人船などの開発に携わっており、無人飛行機に関しては、ドローンよりも長時間飛行できる点を活かして、広範囲の測量や空撮が可能な機材を開発しています。
今回、多目的航空公園では、全長1.7 m、重量5 kgで約1 kg程度の撮影機材などを積むことができる無人飛行機の自動操縦飛行実験を行いました。GPSを活用し、コンピュータで決められた経路を時速70 kmで90分間継続して飛行するという実験を行いました。徐々に飛行時間を延ばし、最終的に計15回の飛行を行い、90分間の自動制御飛行を達成しました。
今後は飛行データを解析し、結果が良ければ年内に実用化に向けた試験を行うようです。


無人機搭載SARのリピートパスインターフェロメトリMTIに係る研究の飛行実験(1)
- 実 験 日:平成28年10月3日(月)から13日(木)
- 実験機関:JAXA航空技術部門、東京電機大学
JAXAでは東京電機大学と連携して、合成開口レーダー(synthetic aperture radar;SAR)というレーダーを搭載した2機の無人機を、時間差をつけて同じ経路を飛行させ、得られたデータを比較する事で、地上の構造物や地上を低速で移動する物体の動きを観測する技術の開発を行っています。この方法は、従来の有人飛行機や人工衛星による観測では難しい秒速数cmの動きにも対応でき、将来的には自然災害等の防災面での活用が期待されています。
今回の実験では、レーダーやGPS等を実際に無人機に搭載し、飛行に与える影響を確認しました。無人機は全長2.7 m、全幅4.2 mのガソリンを燃料としたプロペラ機で、今回は航空公園の上空を10回ほど飛行させました。JAXAの担当者は「今回の実験でレーダーを搭載した際の飛行について、必要なデータを取ることができた。また、町や漁業者の皆さんの協力を頂いて安全を確保しながら実験ができて感謝している。」と話しました。今後、11月には2機を協調させて同時に飛行させる実験、SARによる予備データの取得実験を行う予定です。

超音速パラシュート飛行実験
- 実 験 日:平成28年10月3日(月)
- 実験機関:JAXA研究開発部門
- 実験内容:火星への着陸技術の実現に向けた超音速パラシュートの飛行試験
現在、JAXAでは将来の月や火星等の惑星探査に向けた検討が進められています。火星着陸を実現するためにはいくつかの方法が考えられますが、最も一般的な方法として、火星大気に突入した後、パラシュートを使用して減速するという方法が用いられます。ところが、火星は大樹が非常に薄いなど、地球においてパラシュートを用いる場合と条件が大きく異なります。そこでJAXAでは、火星着陸システムにおいてパラシュートを用いた原則に関わる課題解決のための研究開発を行っています。
今回の実験は、ヘリコプターにより供試体を吊り上げて上空から落下させることにより、火星と同様の環境下におけるパラシュートの放出機構の確認や機械的強度の検証を行うことを目的に行われました。
10月3日午前8時、供試体を吊り上げたヘリコプターが大樹町多目的航空公園を飛び立ち、同8時45分、浜大樹沖合上空600 mから供試体をヘリコプターから切り離し、飛行試験を実施しました。供試体は計画通りパラシュートを放出し、着水予定海域の海上へ着水後、大樹漁協の協力により船舶2隻によって回収され、実験は無事終了しました。JAXAでは得られたデータを解析し、パラシュートの改良を行うそうです。


左:パラシュート供試体 右:ヘリコプターに吊り上げられた供試体
ロケット再突入データ取得研究 再突入モジュール投下試験
- 実 験 日:平成28年9月30日(金)
- 実験機関:JAXA
- 実験内容:再突入モジュールの投下試験
JAXAではロケットの第2段が大気圏に突入して破壊・溶融する様子を観察しデータの収集を行うということを計画しています。今回の実験は、その再突入モジュールの試験モデルをヘリコプターにより上空から海上に投下し、パラシュートや各種システムの動作・機能確認を目的として行われました。
9月30日午前9時、試験モデルを積んだヘリコプターが大樹町多目的航空公園を飛び立ち、同10時、浜大樹沖合上空1500 mから試験モデルを投下し、投下試験を実施しました。試験モデルは海上へ着水後、大樹漁協の協力で船舶2隻によって回収されました。JAXAでは得られたデータを基に改良を行い、計画の実現を目指しています。


左・中:小型再突入モジュールの試験モデルを乗せたヘリコプター 右:投下された試験モデルを回収した漁船
宇宙ステーション補給機「こうのとり」搭載型小型回収カプセル高空落下試験
- 実 験 日:平成28年9月21日(水)
- 実験機関:国立研究開発法人宇宙航空研究開発機構(JAXA)有人宇宙技術部門
- 実験内容:「こうのとり」搭載型小型回収カプセル高空落下試験
国際宇宙ステーション(ISS)では宇宙環境を利用した様々な実験が行われています。しかし、その貴重な実験の成果を地球に持ち帰る機会は限られた回数しかありません。そこでJAXAでは、その実験成果の回収頻度をあげ、ISS利用成果の最大化に資するため、ISSへ物資を運ぶ「こうのとり」に「小型回収カプセル」を搭載し、その「カプセル」に実験成果を乗せて地球へ帰還させる、という技術の開発が進められており、昨年10月に引き続き、今年も大樹町でその実験が行われました。
実験は、昨年と同様、カプセル落下時のデータ取得やパラシュート作動テストを目的として、大樹町沖合の上空2 kmまでカプセル試験モデルをヘリコプターで吊り上げ、そこから落下させるというものですが、昨年の試験結果を反映して、より実際のカプセル回収に近い状態・条件で実験を行いました。実験本番では、パラシュートは正常に作動し、カプセルも大樹漁協の協力により漁船で回収され、実験は無事終了しました。JAXAでは、実験データを解析し、今後も「こうのとり」搭載型小型回収カプセルの実現に向けて開発を続けていくようです。



写真左:カプセル試験モデル 写真中:カプセルを吊り上げる様子 写真右:カプセルを回収する漁船
JAXA大気球実験(3)
- 実 験 日:平成28年9月5日(月)
- 実験機関:JAXA大気球実験班・東北大学
- 実験内容:成層圏オゾン・二酸化窒素の観測
大気球を使用したオゾン(O3)の観測は2013年にも行われていますが、成層圏上部のオゾンを継続して観測する事で、オゾンの量の経年変化を観測します。また、今回の実験では、改良型の気象観測機器を使用し、オゾンの他にもオゾンを破壊する二酸化窒素(NO2)、一酸化臭素(BrO)、二酸化塩素(ClO2)などの観測も行いました。
今回使用された大気球(Gum balloon 2)は満膨張体積10,000 m3(直径29.8 m)の大型気球で、平成28年9月5日の午前3時52分に放球されました。気球は高度45 kmに到達し、観測を終えた後、同日午前7時15分に大樹沖約50 kmの海上に着水しました。
今後、実験主体の東北大学が採取したデータを分析します。


飛行ロボットの自律飛行制御実験(2)
- 実 験 日:平成28年8月4日(木)から8月17日(水)
- 実験機関:電気通信大学情報理工学部 田中研究室
- 実験内容:飛行ロボットの自律飛行制御実験
今年、4月から5月にかけて実験を行った電気通信大学 田中研究室が、それらの実験を踏まえて機体を改良し、再度実験を行いました。あらかじめ風の影響を想定し設定した経路を飛ぶことができるか、風の影響を受ける中でもGPSを利用し指定の経路を飛ぶことができるか、機体に搭載したカメラで撮影した地上の画像を基に飛行経路を自動で決定する技術の開発などの実験が行われました。
JAXA大気球実験(2)
- 実 験 日:平成28年6月12日(日)
- 実験機関:JAXA・金沢大学・東北大学・九州大学など
- 実験内容:火星探査用飛行機の高高度飛行試験
現在の火星探査は、各種火星探査機による火星表面の探索や、宇宙空間から撮影した映像を利用した火星の解析が行われていますが、探査用飛行機を利用した探査は行われていません。探査用飛行機を使用することにより、火星表面の広範囲・高解像度な地形画像の撮影や、低層大気の温度・風などの観測が可能になります。
火星大気の密度は地球の約百分の一と非常に薄く、気温はマイナス60度、さらに強い突風が予想される中を、GPSに頼らず地形や太陽方向を見ながら目的地まで飛行させなくてはなりません。そこで今回の実験では、火星とほぼ同じ空気密度・気温である高度36 kmの上空に大気球で火星探査用飛行機の実験機を運び、その後切り離して飛行させ、各種データを得ることを目的として行われました。
今回使用された大気球(B100A)は満膨張体積100,000 m3(直径63.4 m)の大型気球で、平成28年6月12日の午前3時33分に放球されました。気球は高度36 kmに到達後、同日午前6時20分に実験機を切り離し、実験を実施した。実験機に動力は無く、内蔵コンピュータが姿勢を制御して飛行する仕組みで、2分間、約15 kmを水平に滑空しました。実験機および大気球は大樹沖約35 kmの海上に着水し、回収船によって回収されました。今回の実験でも、大樹町の漁業者の皆さんの協力を得て運航されました。JAXA大気球実験では、地元漁業者の皆さんや、実験の準備などにおいては地元住民の方々が協力しており、JAXAと地元住民が一体となって取組みを進めている実験の一つです。
今後は、実験主体のJAXA宇宙科学研究所がデータを持ち帰り、解析を行うようです。
JAXA大気球実験(1)
- 実 験 日:平成28年6月8日(水)
- 実験機関:JAXA大気球実験班・千葉工業大学惑星探査研究センター
- 実験内容:成層圏における微生物捕獲実験
成層圏(高度10 kmから50 km)付近は生物が存在できる上端と考えられており、古くは1936年から大気球やロケットを使用した微生物採取実験が行われています。成層圏にどのような微生物が、どの程度存在するかを調べることは、生物圏上端がどのようになっているか、また、宇宙から地球へ微生物やウィルスが入ってきているのか、逆に地球の生物が宇宙空間へ出ていくことがあり得るのかを知る手がかりになります。
今回の実験では、微生物採集装置を大気球を用いて成層圏まで上昇させ、その後、大気球から微生物採集装置を切り離し、パラシュートで降下しながら成層圏に浮遊している微生物を採集し、成層圏上層大気中の微生物の形態と分布を観測することを目的として実験が行われました。
今回使用された大気球(B15C)は満膨張体積15,000 m3(直径33.5 m)の大型気球で、平成28年6月8日の午前3時43分に放球されました。気球は高度28 kmに到達後、同日午前5時50分に採集実験を開始し、気球と微生物採集装置は大樹沖約30 kmの海上に着水し、回収船によって回収されました。回収船は今回の実験でも、大樹町の漁業者の皆さんの協力を得て運航されました。JAXA大気球実験では、地元漁業者の皆さんや、実験の準備などにおいては地元住民の方々が協力しており、JAXAと地元住民が一体となって取組みを進めている実験の一つです。
実験では、採集装置の作動、海上での回収について、トラブルも無く成功しました。現在、千葉工業大学惑星探査研究センターでは、採取された微生物試料の分析を行っています。

写真左:大気球放球準備中 写真右:放球後の様子
ロケット姿勢制御飛翔実験
- 実 験 日:平成28年5月18日(水)
- 実験機関:インターステラテクノロジズ株式会社
- 実験内容:推力1500 N級の液体燃料ロケットエンジンを搭載した姿勢制御機体(LEAP 3号機)の打上げ
5月18日(水)、元防衛省エンジン試験場跡地でインターステラテクノロジズの姿勢制御ロケット(LEAP 3号機)の打上げ実験が行われました。ロケットの姿勢制御技術は、打上げたロケットを予定の軌道に乗せるために必要な技術です。インターステラテクノロジズは昨年にも2度、姿勢制御ロケットの打上げ実験を行っており、垂直に飛ばすための姿勢制御に成功しています。
今回の実験では、垂直な飛翔を維持するだけでなく、目的の方向に飛翔させるための誘導技術の試験を行いました。ロケットはエンジンの噴射方向を変えながら垂直に上昇し、途中で方向を変化させた後、再度垂直方向に上昇しました。高度180 mまで上昇させる予定でしたが、途中で機体がバランスを崩したため、高度100 mほどで緊急停止しパラシュートで落下させました。インターステラテクノロジズの担当者は「大成功ではないが、実験としては満足している」と話しました。

災害対策用係留気球実験
- 実 験 日:平成28年5月9日(月)から5月13日(金)
- 実験機関:ソフトバンク株式会社
- 実験内容:係留気球による臨時無線中継システムの実証実験
ソフトバンク株式会社では、災害により携帯電話基地局が倒壊した場合に、早期に携帯電話の通話エリアを確保する手段として、係留気球に無線中継装置を搭載する「臨時無線中継システム」を開発しています。ソフトバンク株式会社は、これまで本州で2回実験を行っていて、今回、多目的航空公園では、改良を加えた気球用のアンテナの動作や性能を確認する実証実験を行いました。直径5.2 mの気球を高さ100 mまで上昇させてロープで係留し、約1 km離れた地点で実際の携帯電話を使用して通信速度を確認しました。実験担当者は「想定したとおりの性能を実験で確認することができた」と話しました。

飛行ロボットの自律飛行制御実験(1)
- 実 験 日:平成28年4月28日(木)から5月9日(月)
- 実験機関:電気通信大学情報理工学部 田中研究室
- 実験内容:飛行ロボットの自律飛行制御実験
最近、災害などの極限環境の中でも空からの活用が期待できる無人航空機(Unmanned Aerial Vehicle : UAV)が注目されています。電気通信大学の田中研究室ではスマート飛行体(スマートにミッションを遂行する自律飛行ロボット)の開発に関する研究を行っており、これまでも大樹町で実験を繰返していて、自動での離着陸やあらかじめ設定した地点の撮影などに成功しています。
田中研究室では現在、低速・低高度でも安全に飛行可能な「パラグライダー型UAV」(写真左)と、低コスト高パフォーマンス「固定翼型UAV」(写真右)の2種類の機体を開発中です。今回の実験では2機ともラジコン操縦・自動操縦で飛行させ、パラグライダー型UAVでは飛行時に風の影響を計算しながら指定した経路の飛行ができるかについて、固定翼型UAVでは高度・速度を保って飛行できるかについての実験を行い、どちらの機体でも想定通り飛行させることができました。


無人プロペラ機の遠隔操縦試験
- 実 験 日:平成28年4月25日(月)から4月29日(金)
- 実験機関:PDエアロスペース株式会社
- 実験内容:無人プロペラ機の遠隔操縦試験
PDエアロスペースは、ジェットエンジンで離陸し、上空でロケットエンジンに切り替えて宇宙に向かう飛行機型の宇宙機開発を行っています。大樹町で実験を行うのは、今回が初めてで、今回は全幅3.3 m、重さ18 kgの無人プロペラ機から約1 km離れたデータ受信地点に、機体に取り付けたカメラによる映像や機体の姿勢などの情報が正常に送信されるか試験した。今後は無人機を飛行させ、飛行時のデータ受信を確認する予定です。

2段式CAMUI型ハイブリッドロケット打上げ実験
- 実 験 日:平成28年4月14日(木)
- 実験機関:北海道大学、植松電機
- 実験内容:2段式CAMUI型ハイブリッドロケットの打上げ実験
CAMUI型ハイブリッドロケットとは、プラスチックを燃料、液体酸素を酸化剤とするハイブリッドロケットです。CAMUIの名前はCAscaded MUltistage Impinging-jet(縦列多段衝突噴流)の頭文字をとってつけられました。このCAMUI型とは、燃焼ガスが固体燃料表面への衝突を順次繰り返す燃焼方式のことを言います。この燃焼方式により、プラスチック燃料を使用しているにも関わらず大きな推力を得ることができます。プラスチック燃料を使用する利点は、安全であること、コストを大幅に削減できることが挙げられます。
これまでに何度もCAMUIロケットの打上げが大樹町で行われていますが、今回は初めて2段式のCAMUI型ロケットの打上げ実験が行われました。ロケットは1段目のロケットで上昇後(写真左)、1段目のロケットを分離して2段目のロケットのエンジンが作動し(写真右)、機体はさらに高度を上げました。今回の実験により、2段目のロケットへのエンジン点火に必要な技術を確認しました。今後はより推力の大きなロケットエンジンの試験を行う予定です。


2015年度実験実績等
重力天体着陸機の実験機性能試験
- 実 験 日:平成28年3月27日(日)から3月31日(木)
- 実験機関:JAXA
- 実験内容:重力天体着陸機の実験機の性能試験
現在、計画が進められている月着陸探査機、SLIMやSELENE-RPでは、当然ながら惑星への着陸技術が必要となります。今回の実験では、それら月着陸探査機の他、将来の月・火星着陸探査に必要な着陸技術の開発を目的として、着陸機の実験用機体の基本性能試験が行われました。
実験機は縦、横、高さが各1.5 m、重さは約80 kgあり、地面方向へ窒素ガスを噴射することにより、浮遊・軟着陸を行います。27日から30日までは、実験機の気密性・耐圧性やコンピュータ関連機能の確認試験を行いました。31日は実験機を浮遊させず、地上で窒素ガスが正常に噴射できるかを試験し、想定どおり機能することを確認しました。今回の実験で、機体を飛ばす直前までの機能は確認でき、今後は、実験機の飛行試験を年内にも行う予定としています。


東海大学学生ロケットプロジェクト
- 実 験 日:平成28年2月28日(日)から3月7日(月)
- 実験機関:東海大学学生ロケットプロジェクト
- 実験内容:ハイブリッドロケットの打上げ
東海大学学生ロケットプロジェクトは、手作りで低価格なロケット開発の場を学生に提供する事で、学生が机上では学べない宇宙理工学の知識・技術を修得させ、将来の宇宙技術者を養成することを目的として1995年に設立されました。大樹町では、2004年からほぼ毎年、自作のハイブリッドロケットの打上げを大樹町で実施しています。
今回は3月2日と3月6日にそれぞれ1機ずつロケットを打上げました(2日:41号機、6日:40号機)。41号機は打上後、高度約400 mまで、40号機は高度約1000 mまで上昇し、両機ともパラシュートを開傘、無事着地・回収されました。今回得られたデータを基に、ロケットの大型化や高高度化を進めていきます。



無人ヘリコプターの寒冷地試験(2)
- 実 験 日:平成28年2月15日(月)から2月18日(木)
- 実験機関:YAMAHA発動機(株)
- 実験内容:YAMAHA発動機製無人ヘリコプターの寒冷地試験
1月に行われた試験に引き続き、YAMAHA発動機による無人ヘリコプターの寒冷地試験が行われました。
無人ヘリコプターの寒冷地試験(1)
- 実 験 日:平成28年1月24日(日)から1月26日(火)
- 実験機関:YAMAHA発動機(株)
- 実験内容:YAMAHA発動機製無人ヘリコプターの寒冷地試験
無人航空機にはいくつもの種類がありますが、その中でも無人ヘリコプターはホバリング飛行ができることが最大の特徴です。無人ヘリコプターはこの特徴を活かし、農薬の散布、火山や地すべりといった人の近づけない環境の観測などに利用されています。
YAMAHA発動機(株)では、無人ヘリコプターを開発しており、今回大樹町多目的航空公園において、その寒冷地試験が行われました。試験は早朝から、時には気温マイナス18℃に冷え込む中で行われましたが、試験は無事終了して、低温環境下での様々な飛行データが得られたようでした。


HTV搭載小型回収カプセル高空落下試験
- 実 験 日:平成27年10月16日(金)から10月23日(金)
- 実験機関:JAXA HTV技術センター
- 実験内容:宇宙ステーション補給機「こうのとり」(H-II Transfer Vehicle:HTV)搭載小型回収カプセル高空落下試験
JAXA HTV技術センターは10月16日から23日まで大樹航空宇宙実験場(大樹町多目的航空公園内)において、HTVに搭載予定の小型回収カプセルの試験モデルの高空落下試験を実施しました。
10月22日午前10時、直径84 cm、重量170 kgの試験モデルカプセルをヘリコプタで吊り上げ、同11時、浜大樹沖合上空2 kmから試験モデルカプセルを切り離し、高空落下試験を実施しました。試験モデルカプセルはパラシュートにより軟降下し着水後、大樹漁協の協力で船舶2隻により回収されました。JAXA有人宇宙技術部門HTV技術センターの実験担当者は「実験は天候にも恵まれ、計画通り実施でき、予定のデータ取得ができました。警戒、回収にあたってくれた大樹漁協の協力に感謝します。」と話していました。
HTVが国際宇宙ステーションに物資を運び、カプセルにより貴重な試料を地球に送るシステムの開発が、大きく前進したようです。




飛行ロボットの自律飛行制御実験
- 実 験 日:平成27年10月3日(土)から10月15日(木)
- 実験期間:電気通信大学 田中一男・田中基康研究室
- 実験内容:飛行ロボットの自律飛行制御実験
最近、災害などの極限環境の中でも空からの活用が期待できる無人航空機(Unmanned Aerial Vehicle : UAV)が注目されています。電気通信大学の田中一男・田中基康研究室のUAV研究チームではスマート飛行体(スマートにミッションを遂行する自律飛行ロボット)の開発に関する研究を行っており、今回、大樹町多目的航空公園で実験を行いました。
UAV研究チームでは現在2種類の機体を開発中です。1つは低速、低高度でも安全に飛行可能な「パラグライダー型UAV」(写真左)です。今回、洋上までの安定飛行、カメラでの情報収集、滑走路への自動着陸といったミッション型実験を行い、いずれの実験も成功しました(実験の様子はこちら(外部サイト))。この研究が進めば、初心者でも簡単に運用・保守が可能な「誰でも、どこでも、安全に」利用可能なUAVの開発が期待できます。
もう1つの機体は、低コスト高パフォーマンス「固定翼型UAV」(写真右)です。こちらは今回、設定した高度を保ちながら、複数の地点を自動飛行により周回し、帰還する実験に成功しました(実験の様子はこちら(外部サイト))。

JAXA大気球実験(2)
- 実 験 日:平成27年8月22日(土)
- 実験機関:JAXA大気球実験班
- 実験内容:国際宇宙ステーション(ISS)からの放出衛生(EGG)の搭載機器の動作・運用確認
今回の実験の目的は、ISSから放出される超小型衛星「EGG(re-Entry satellite with Gossamer aeroshell and GPS/Iridium)」の前段階試験でした。EGGとは、展開型柔軟エアロシェルの最終技術実証を目的とした低軌道からの再突入実証試験(TITANS)の準備段階として、ISSから放出される実験機です。展開型柔軟エアロシェルとは、パラシュートのように柔軟で折りたたみ可能なエアロシェルです。打上げ時は小さく畳んで収納し、速度を抑えた穏やかな大気圏突入が可能といったメリットがあり、次世代の大気圏突入システムとして、超小型衛星の再突入回収システムや小型惑星探査機への応用が期待されています。今回の実験では、EGGとほぼ同等の機能を有する実験機を大気球により高空まで上昇させ、長時間で長距離を移動する間を利用して、民間の衛星通信経由による太陽パネル展開やガス放出試験を実施しました。
大気球(Gum balloon 2)は午前5時2分に放球されました。今回使用された気球は満膨張時直径11 mのゴム気球で、毎分およそ380 mの速度で上昇しました。大気球は、放球1時間36分後に大樹町多目的航空公園東北東約55 kmの太平洋上において高度約31.7 kmに達しました。実験機はパラシュートによって大樹沖約95 kmの海上に緩降下し、回収船によって回収されました。回収船は、今回の実験でも、大樹町の漁業者の皆さんの協力を得て運航されました。JAXA大気球実験では、地元漁業者の皆さんや、実験の準備などにおいては地元住民の方々が協力しており、JAXAと地元住民が一体となって取組みを進めている実験の一つです。
今年度、大樹町多目的航空公園で行われる大気球実験のうち「成層圏における微生物捕獲実験」は、実験機器側の調整に時間を要し、また今後の気象条件が気球飛翔運用に適さないため、実施を見送る事となり、今年度の大樹町での大気球実験は全て終了しました。詳しくはJAXA<トピックス>をご覧ください。
JAXA大気球実験(1)
- 実 験 日:平成27年8月6日(木)
- 実験機関:JAXA大気球実験班
- 実験内容:大気球を用いたクライオジェニック法による成層圏大気の採取
今回の実験の目的は、クライオジェニック法(cryogenic法)による成層圏大気の採取でした。クライオジェニック法とは、採取した大気を-270℃ほどの超低温に冷やし、採取した大気を気体から固体へ状態変化させながら採取する方法です。この方法の利点は、気圧の低い上空で希薄となっている大気を、小規模な採取容器でも大量に採取することが出来るという点です。採取された大気は、各大学に送られ、その成分濃度や同位体比の測定に使用されます。
大気球(FB100A)は午前4時12分に放球され、成層圏大気を採取しながら上昇していきました。今回使用された気球は満膨張体積100,000 m3(直径63.4 m2)にもなる大型気球でした。気球は、放球3時間後、最高高度34.8 kmに達し、その後、午前7時49分に指令電波による遠隔操作によって気球と観測器は切り離され、気球および観測器は大樹沖約30 kmの海上に着水し、回収船によって回収されました。回収船は、今回の実験でも、大樹町の漁業者の皆さんの協力を得て運航されました。JAXA大気球実験では、地元漁業者の皆さんや、実験の準備などにおいては地元住民の方々が協力しており、JAXAと地元住民が一体となって取組みを進めている実験の一つです。
今年度、大樹町多目的航空公園で行われる大気球実験は、上記実験の他に「成層圏における微生物捕獲実験」と「ISSからの放出衛生搭載機器の動作確認、及び、運用確認試験」が行われる予定です。詳しくはJAXA<トピックス>をご覧ください。



1. 大気球移動中 2. 放球直前 3. 放球!
2014年度実験実績等
ハイブリッドロケット打上実験
- 実験日:平成27年3月5日〜3月13日
- 実験機関:東海大学学生ロケットプロジェクト
- 実験内容:本年度の打上げでは団体の目標である高高度化に向けた、技術立証実験として、2機を開発し、打上げに望みました。
ハイブリッドロケット36号機(H-36)は、3/12に打上げられ、エンジンの酸化剤供給システムの刷新を図り、より安全で大型化を可能とするための基礎実験を行いました。
ハイブリッドロケット37/38/39号機(H-37/38/39)はパラシュート開傘時の衝撃値(オープニングショックと言います)の実測を目的とし、同じ機体・同じパラシュート・同じ開傘方式と条件を揃えてデータを取得することで、大型化して衝撃値がどの程度大きくなるかの指標となる値の回収を行いました。H-37は3/7、H-38は3/8に打上げを行いましたが、H-38がパラシュートが開傘せず、機体が大破してしまったため、H-39の打上げは断念せざるを得ませんでした。今後は今回取得したデータを解析して、8月に秋田県能代市(能代宇宙イベント)で打上げを予定しているロケットや今後の大型ロケットに活かしていくとの事です。


ヘリコプタ飛行技術の研究
- 実験日:平成26年10月20日〜10月31日
- 実験機関:JAXA 研究開発本部飛行技術研究センター
- 実験内容:航空公園において「ヘリコプタの後流計測」が行われました。この実験は、ヘリコプタの後流(後方にまわりこむようにできる流れ)により後続機や駐機中の機体(特に小型機)の姿勢が乱れ、飛行安全に影響を及ぼす事があるため、飛行安全向上に向け、ヘリコプタ後流の空間的広がりや挙動を計測する事を目的に実施されました。実験では、ヘリコプタを主に滑走路上で飛行させ、その後流をドップラーライダ(レーザレーダ)や超音波風速計で計測したり、煙を使って可視化を行いました。

【ヘリコプタ後流の可視化の様子】
JAXA 光検出デバイスLIDARXフィールド実験
- 実験日:平成26年9月22日〜10月3日
- 実験機関:JAXA 月・惑星探査プログラムグループ
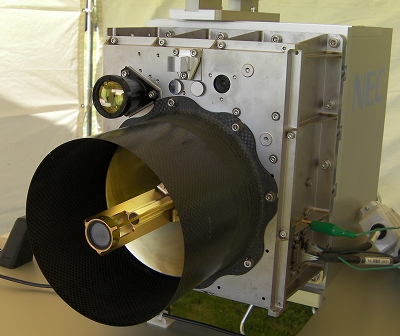
- 実験内容:昨年もこの多目的航空公園において、11月末に打上げが予定されている小惑星探査機「はやぶさ2」のレーザ高度計(LIDAR)フィールド試験が行われました。レーザ高度計とは、対象天体に向けレーザを発射し、天体表面で散乱して帰ってくるレーザ光を検出し、レーザ光の往復時間を測定することにより、探査機と天体表面との距離(高度)を測定する装置です。
今回実施されたLIDARXフィールド試験は、新たに開発した大きさ3mm四方のICチップ(LIDARXベアチップ)の性能チェックが主な目的です。このチップは将来の小惑星や月惑星探査機のレーザ高度計のために開発されています。


トライククラブ空界
- 実験日:平成26年8月25日〜9月3日
- 実験機関:トライククラブ空界
- 実験内容:トライククラブ空界は、多目的航空公園が整備された直後から毎年やってきてフライトを楽しんでいます。今年は天気にも恵まれ、フライトを楽しんでいました。

JAXA大気球実験
- 実験日:平成26年8月22日
- 実験機関:JAXA大気球実験班
- 実験内容:8月22日(金)午前4時27分に、大気球(B14-01)が放球されました。
今回の実験では、高度約40kmに達した気球からロケット型の実験機(BOV)を落下させ、微小重力実験環境を確保する技術と微小重力環境を用いた燃焼現象の観察のために放球が行われました。午前4時27分の放球後、予定どおり実験が行われ、約30秒間、微小重力環境を得る事ができました。
また、燃焼実験についてはカメラによる撮影にも成功しました。全ての実験を終えた気球・実験機器は大樹沖約35kmの海上に着水し、ヘリコプターと回収船によって回収されました。回収船は、今回の実験でも、大樹町の漁業者の皆さんの協力を得て運行されました。JAXA大気球実験では、地元漁業者の皆さんや、実験の準備などにおいては地元住民の方々が協力しており、JAXAと地元住民が一体となって取組みを進めている実験の一つです。今後、回収したデータを解析し、様々な分野で活用されていく予定です。
詳しくはJAXA<トピックス>
また、この大気球実験の裏側(準備)を「Taiki Aerospece News NO.14」で特集しています。是非ご覧ください。


飛行船型係留気球を用いた撮影・通信実験
●実験日:平成26年6月18日〜6月20日、7月5日〜7月7日
●実験機関:(株)スカイプラットフォーム
●実験内容:6月18日〜20日の3日間、(株)スカイプラットフォームは、航空公園において「飛行船型係留気球を用いた撮影実験」を行いました。同社は、大樹町内に機体組立場を有し、設計・製造から運用まで手掛けている会社です。
今回は大樹町にて製造した全長12mの機体下部にカメラを設置し、高度200mまでの間で映像を撮影し、映像の状態(ノイズ等)、船体とカメラの位置関係等を確認しました。実験は順調に進み、計画通り全ての実験(撮影)が終了しました。
また、7月5日〜7日までの3日間、同公園にて「飛行船型係留気球を用いた通信実験」を行いました。先の実験とは異なる、全長10.8mの機体に無線機器を搭載し、高度200mまで上昇させ、地上局との間で通信実験を行いました。沖から入る霧も実験時間には消え、当初予定していた全ての実験を終了しました。
同社代表の蛭田氏は、「航空公園という実験場を所有する大樹町に機体組立場を持てたのは、我が社にとって幸運でした。今後も、ここ大樹町をベースに多様な実験のプラットフォームとして、飛行船型係留気球の開発・製造・運用を行っていきたいと考えています。」と語っていました。

飛行ロボットの自律飛行制御実験
●実験日:平成26年4月25日〜5月7日
●実験機関:電気通信大学
●実験内容:電気通信大学は、4月25日〜5月7日まで飛行ロボットの自律飛行制御実験を実施しました。昨年度からハードウェア(コンピューター)を変更し、このシステムの検証を目的に実験が実施されました。
実験リーダーの伊藤唯さんは、「ハードウェアを変えた事で、より細かな制御が可能となり、自分たちが地上から送る指示に今までより早く制御ができるようになった。その一方、現状では対応しきれない部分もあるので、これらを今後改善していく必要がある」と語っていました。
最終的には、災害時等における活用を目標としています。

2013年度実験実績等
小型ロケット打上げ実験
- 実験日:平成26年3月14日
- 実験機関:東海大学学生ロケットプロジェクト
- 実験内容:東海大学学生ロケットプロジェクトのメンバーは、3月14日、大樹町内の原野でハイブリッドロケットの打上実験を実施しました。大樹町での実験は昨年度に引き続き10度目となります。
今回は、パラシュート放出用回路の実証、大型エンジン開発に向けたエンジンの技術実証を目的に打上実験が行われました。機体は全長2.3mで、燃料にはワックス燃料、酸化剤に亜酸化窒素が使用されています。ロケットは予定通り打上げられ、高度約900mまで到達した後、パラシュートが展開され、無事に回収されました。


無人ヘリコプターの寒冷地試験
- 実験日:平成26年2月23日〜2月25日
- 実験機関:ヤマハ発動機(株)
- 実験内容:ヤマハ発動機(株)は、航空公園で、無人ヘリコプターを用いた寒冷地試験を実施しました。 試験に使用された機体は、同社製の無人ヘリコプター(全長約3.7m)で、農薬散布など様々な場所で使用されています。 今回は、低温環境が飛行制御に与える影響や負荷重量の限界を確認するための試験が実施され、気温が下がる早朝から試験飛行が実施されました。


無人機を用いた探索試験
- 実験日:平成26年2月8日〜2月21日
- 実験機関:(株)IHIエアロスペース
- 実験内容:(株)IHIエアロスペースは、航空公園等で無人飛行機を用いた探索試験を実施しました。
この試験は、「i-Ball」など宇宙空間から地球へ帰還する機器の探索を、従来の小型ビジネスジェットから、低コストで探索できる無人機に変えて運用可能であるか検証するために実施されました。
試験では、i-Ballに見立てた被写体を洋上に浮かべ、あらかじめ設定した経路上に無人機を飛行させて被写体を探索し、上空から被写体を撮影する試験を行いました。
i-Ballは同社で開発され、当町では開発に係る落下実験や海上通信実験、そして世界初の快挙となったデータ受信実験が行われ、大樹町はまさに、「i-Ballが育った町」です。
同社では、今後も同様の試験を数度実施する予定です。


小型無人飛行機を利用した無線伝送実験
- 実験日:平成25年11月16日〜11月21日
- 実験機関:(独)情報通信研究機構(NICT)
- 実験内容:(独)情報通信研究機構(NICT)は、大樹町多目的航空公園で「小型無人飛行機を利用した無線伝送実験」を実施しました。本実験では、災害時において地上でのネットワークが不能となった地域との通信を確保するシステム構築のための実験を行い、今回は、約20km離れた地上局間で小型無人航空機に搭載した中継機を経由したデータ伝送を確認しました。この技術は、上空に飛行させた無人機を介す事でネットワーク不能地域との通信網を確保しようとするもので、地上でのネットワークに代わるシステムとして期待されています。またその他にも、冬山での遭難者救助に利用可能な、地上のどこでどんな電波が発せられているのか上空から確認するための実験や、動物の行動経路などを追跡するための実験も実施されました。今回の実験について、NICTワイヤレスネットワーク研究所 滝沢主任研究員は、「小型無人航空機は、今後、災害後の情報収集や救難捜索など、多くの人たちに安心・安全を届けられる分野へ利用されることが期待されています。今回の通信実験では、その礎となる成果を多く得ることができました」と語っていました。
無人飛行機の飛行実験
- 実験日:平成25年11月11日〜11月15日
- 実験機関:X-TREME COMPOSITE JAPAN
- 実験内容:X-TREME COMPOSITE JAPANは、大樹町多目的航空公園で「無人飛行機の飛行実験」を実施しました。今回は、通信テストなどを行い自動制御のための実験が行われました。本実験では、水平離発着による飛行実験が行われましたが、今後は、垂直離発着ができるよう開発を進め、来年までの完成を目指しています。

4発ティルト翼VTOL小型技術実証機飛行実験
- 実験日:平成25年10月7日〜10月12日
- 実験機関:JAXA
- 実験内容:宇宙航空研究開発機構(JAXA)は、大樹町多目的航空公園にて、「4発ティルト翼VTOL機の飛行実験」を実施しました。本実験は今年で5年目の実験実施となります。今年は昨年の機体よりも小型化(全長1.1m、全幅1.4m、重さ4.6kg)した機体を使用し昨年までのシステムを活かし、有人機開発へ向けた基本制御や安全性を向上するための飛行評価のためデータを取得しました。来年からは連携する大学が開発した制御則を取り入れ実験を実施する予定です。実験責任者であるJAXA村岡氏は、「VTOLの能力を最大限に活かす技術として成熟につなげたい」と語っていました。

災害時の情報収集を目的とした無人航空機自律飛行制御実験
- 実験日:平成25年9月27日〜10月8日
- 実験機関:神戸大学・消防研究センター
- 実験内容:神戸大学と消防研究センターが合同で、「災害時の情報収集を目的とした無人航空機自律飛行制御実験」を実施しました。この実験は、災害現場での被災地状況把握や要救助者発見などの情報収集を行うためのシステムを確立するために実施されました。本実験では、飛行機とヘリコプターの特性を合わせ持つティルトロータと呼ばれるタイプ・飛行船タイプ・複数のプロペラからなるマルチコプタータイプの3種類の実験機が使用され、自動でのホバリングや離発着などがテストされました。取得したデータは解析を進め、安定して飛行できる信頼性の高いシステムの確立のために活用されます。

世界新記録更新! 超薄膜高高度気球の飛翔性能試験
- 実験日:2013年9月20日
- 実験機関:JAXA大気球実験室
- 実験内容: 宇宙航空研究開発機構(JAXA)は、大樹町多目的航空公園にて、「超薄膜高高度気球の飛翔性能試験」を実施しました。気球は高度53.7kmまで上昇し、気球到達最高高度の世界新記録を樹立しました。これまでの記録は、2002年5月に当時の文部科学省宇宙科学研究所(後にJAXAに統合)が三陸大気球観測所(岩手県大船渡市)で放球した超薄膜高高度気球(厚さ3.4ミクロン(1000分の3.4ミリ))の到達高度53.0 kmで、11年振りに自身の持つ記録を更新したことになります。本実験の気球は、厚さ2.8ミクロンのポリエチレンフィルムで作られています。これは世界で最も薄い気球用フィルムで、JAXAが新たに開発したものです。非常に軽いフィルムを使う事で、これまで不可能だった高さを飛翔する気球が作られました。

凧の基本特性の計測実験
- 実験日:2013年9月2日〜9月10日
- 実験機関:東京大学生産技術研究所
- 実験内容: この実験は、長期間の金星探査を行える可能性がある凧を利用した新しい探査システムについて、シュミレーションモデルの検証とチューニングに使用するための基礎的なデータの取得を目的に実施されました。かつて、バルーンを使用した金星探査は実施されましたが、観測時間の大幅な増加は難しく1度の観測で終了しています。一方,凧の場合はヘリウムガスが不要であり,風力発電も可能である事から、観測時間の大幅な増加が期待できます。今回は、3種類の凧を使用して「車の牽引による飛行実験」と「係留気球からの降下実験」を実施し各種データの取得を行いました。

小型ロケット(すずかぜ、CAMUI-500p)打上実験
- 実験日:2013年8月10日
- 実験機関:SNS株式会社、NPO法人北海道宇宙科学技術創成センター(HASTIC)
- 実験内容:平成25年8月10日、午前7時53分に、ライブドア元社長の堀江貴文氏が創業者となる「SNS株式会社」(東京都港区)は、大樹町浜大樹の防衛省エンジン試験場跡地から、小型液体燃料ロケット「すずかぜ」の打上実験を行いました。また、同日午前11時45分には、同じ射場から、「NPO法人北海道宇宙科学技術創成センター(HASTIC)」(札幌市)の開発する道産ハイブリッドロケット「CAMUI-500p」の打上げを行いました。両ロケットは、予定通り打ち上げられ、過去の実績を上回るデータを取得できました。


騒音大気伝搬特性計測実験
- 実験日:2013年7月6日〜7月21日
- 実験機関:JAXA
- 実験内容:平成25年7月6日から7月21日まで、大樹町多目的航空公園において、JAXA DREAMSプロジェクトチームによる「騒音大気伝搬特性計測実験」が行われました。この実験は、航空機から発生した騒音が、地上でどのように聞こえるかを予測するモデルを構築するためであり、昨年に引き続き係留気球を使用して実施しました。航空公園では、係留気球と地上にそれぞれ設置したスピーカーから音を発し、上空と地上の双方向での騒音の伝わり方を計測しました。昨年11月にも同様の計測を実施しましたが,今回は昨年とは異なる気象条件(気温の高度分布)の下で、データの更なる拡充を目指し実験を実施しました。


「はやぶさ2」レーザ高度計(LIDAR)フィールド試験
- 実験日:2013年5月27日〜5月31日
- 実験機関:JAXA
- 実験内容:平成25年5月27日から5月31日まで、大樹町多目的航空公園において、「はやぶさ2」レーザ高度計(LIDAR)フィールド試験が行われました。 「はやぶさ2」は日本国民に感動を与えたあの「はやぶさ」の後継機として、2014年中の打上げを目指し開発が進められています。大樹町では、対象天体(名称「1999JU3」 地球と火星の間を周っている小惑星。全長最大1km弱)に接近・着陸するために必須である「レーザ高度計」のフィールド試験を実施しました。レーザ高度計は、対象天体に向けレーザを発射し、天体表面で散乱して帰ってくるレーザ光を検出します。このときのレーザ光の往復時間を測定することによって、探査機と天体表面との距離(高度)を測定する装置です。写真左上に見えるレンズはレーザの出射口で、ほぼ中央にある大きな望遠鏡は小惑星から反射してくるわずかな光を検出器に集めるための反射望遠鏡です。また、このレーザ高度計は小惑星の形状や地質の測定にも活用されます。
第一次気球実験(BS13-04)
- 実験日:2013年5月25日
- 実験機関:JAXA大気球実験室
- 実験内容:平成25年5月25日(土)午前1時51分に、3号機BS13-04が打上げられました。この実験では、スーパープレッシャー(SP)気球(満膨張体積10m3)とゴム気球を連結した「タンデム気球」を使用しました。皮膜に網をかぶせる手法で製作されたSP気球は、高耐圧を軽量で実現し、大重量の観測装置を吊下げて長時間飛翔させることが可能な飛翔体です。網をかぶせたSP気球の性質や、2つの気球を組み合わせた時の飛び方を調査することを目的に実施されました。今回の飛翔試験では、日照前と日照後にまたがるよう飛翔させた事により、昼夜による気球の高度変化(飛び方)のデータを取得する事に成功しました。また、網をかぶせた気球が体積300,000m3の大型SP気球で求められる強度を有することが確認できました。JAXAでは、今後、大型のSP気球の開発とともに昼夜で高度を変化させながら長時間飛翔できるタンデム気球の開発を進めていく予定です。

第一次気球実験(BS13-02,BS13-03)
- 実験日:2013年5月15日
- 実験機関:JAXA大気球実験室
- 実験内容:平成25年5月15日(水)午前4時50分に、平成25年度第一次気球実験の初号機BS13-02(満膨張体積200m3のゴム気球)が打ち上げられ、その後、午前5時41分に2号機BS13-03(満膨張体積10,000m3の薄膜気球)が打上げられました。今回の実験では、地表付近から上部成層圏にかけてのオゾン高度分布と大気重力波の高度毎の特徴を明らかにすることを目的として実験されました。本実験で、高度43kmの上部成層圏領域までの大気の観測に成功しました。上部成層圏のオゾンを直接測定できる観測器は他にはなく、これらの領域のオゾン変動を調べる貴重なデータを得ることができました。
平成25年度実験計画発表(JAXA)
- 実施日:2013年5月10日
- 実施機関:JAXA
- 実施内容:大気球指令管制棟において、平成25年度中の大樹航空宇宙実験場における実験計画等の説明会を開催しました。大気球実験に関しては宇宙科学研究所大気球実験室 吉田室長から、飛行実験などその他実験に関しては航空本部飛行技術研究センター 柳原センター長からそれぞれ実験概要の説明がありました。 大気球実験は、今年度7実験を予定していて、第一次実験は5月上旬から6月下旬頃まで、第二次実験は7月下旬から9月下旬頃の期間で開催されます。飛行実験は、ティルト翼VTOL機安全性向上技術研究などの実験を、その他の実験としては、はやぶさ2レーザ高度計の確認試験が行われます。
自律飛行ロボットの飛行制御実験
- 実験日:2013年5月1日〜5月7日
- 実験機関:電気通信大学 田中研究室
- 実験内容:電気通信大学田中研究室では、昨年9月の実験に引き続き「飛行ロボットの自律飛行制御実験」を実施しました。今回は、携帯電話を機体に搭載し実験を行いました。携帯電話を利用する事により、携帯回線を使用して携帯カメラで撮影した画像を送る事が可能になります。また、GPS機能も付帯していることから、事前に登録した地点で写真を撮影することも可能になります。今回の実験では、この携帯電話を利用した試験を目的に実験が行われました。


2012年度の実験実績等
東海大学学生ロケットプロジェクト
- 実験日:2013年3月8日〜3月14日
- 実験機関:東海大学学生ロケットプロジェクト
- 実験内容:東海大学学生ロケットプロジェクトは、大樹町美成の原野で、「ハイブリッドロケット打上げ実験」を実施しました。大樹町での実験は昨年に引き続き通算9度目の実験となります。今回の実験は、二段分離機構を用いた多段回収システムの実証などを目的とした29号機(TSRP-H-29)とピトー管による対気速度の計測などを目的とした30号機(TSRP-H-30)の2機の打ち上げとなりました。11日に打上げられた29号機は、高度約350mに到達し、無事回収されました。12日に打上げられた30号機は、予定では高度700mを目指していましたが、飛翔中の機体トラブルにより、計画どおりの飛行とはなりませんでした。プロジェクトマネージャーの坂野文菜さんは、「両機ともに少しトラブルがあったが、トラブルのおかげで改善点を見つけ出すことができたので、来年度以降の開発に生かしていきたい。」と語っていました。

CAMUI型ロケット・SNS製液体ロケット打上げ実験
- 実験日:2013年3月2日〜3月3日
- 実験機関:NPO法人北海道宇宙科学技術創成センター(HASTIC)・(株)カムイスペースワークス(CSW)・SNS(株)
- 実験内容:HASTIC・CSW・SNSは、大樹町浜大樹の旧防衛省エンジン試験場跡地において、「CAMUI型ロケット(CAMUI-500B)」・「SNS製液体ロケット(ひなまつり)」の打上げ実験を実施するため、大樹町航空公園格納庫等で準備していましたが、天候不良(高波・強風)のため、3月2日・3日の打上実験を断念しました。延期等の詳細については、HASTICのホームページ(こちら)をご覧ください。


小型無人固定翼機等の飛行試験
- 実験日:2013年1月22日〜1月29日
- 実験機関:金沢大学・横浜国立大学
- 実験内容:金沢大学と横浜国立大学は、大樹町美成の原野で、宇宙と地球を行き来する将来の往還機の安全技術構築のための「小型無人固定翼機等の飛行試験」を実施しました。全長約80センチ、幅約40センチ、重さ約800グラムの機体を気球で上空100メートルまでつり上げた後、落下させ、自動制御で飛行させる実験です。天候にも恵まれ、順調に実験を実施でき、様々なデータを取得できたようです。今後、実験で得たデータを解析し、さらなる研究・開発が進められます。

騒音大気伝搬特性計測試験
- 実験日:2012年11月19日〜12月1日
- 実験機関:JAXA航空プログラムグル―プ
- 実験内容:JAXA航空プログラムグループは、ヘリコプタや係留気球(全長15m)を使用した「騒音大気伝搬特性計測試験」を実施しました。この実験は大気中の騒音の伝わり方を計測し、航空機などの騒音対策に生かそうという開発です。実験では、ヘリコプタの離着陸時の騒音や上空100m〜500mに上げた係留気球に取り付けられたスピーカーからの音(騒音)を計測しました。今後、実験で得られたデータから騒音の伝わり方などを分析し、高精度の航空騒音予測などに役立てられる予定です。
ヘリコプタ用状況認識支援技術(SAVERH)飛行実験
- 実験日:2012年11月4日〜16日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、「ヘリコプタ用状況認識支援技術(SAVERH(セイバー))飛行実験」を実施しました。昨年に引き続き実施されたこの実験では、ヘリコプタに取り付けられたセンサー情報などの開発を目的に実施されました。この技術は、ヘリコプタによる悪天候や夜間の際の災害救援や捜索活動を安全に実施できるよう、ヘリコプタに搭載されたセンサー情報や赤外線カメラの映像を通じて、パイロットに飛行情報を見せるための技術です。JAXA舩引氏は、「今回は、予定していた開発が出来たので、今後、性能や信頼性能向上を進めていきたい。」と語っていました。
小型無人機飛行実験
- 実験日:2012年10月29日〜11月22日
- 実験機関:JAXA無人機・未来型航空機チーム
- 実験内容:JAXA無人機・未来型航空機チームは、SAFE-1型機(重量:約5kg、翼長:約2m、飛行速度:7~25m/s)を使用した今年4回目の「小型無人機飛行実験」を実施しました。この実験の後半では、大樹町多目的航空公園を飛び出し、大樹町相川の歴舟川上流で実際の崖崩れなど災害を想定した飛行実験を実施しました。離陸した無人機は、あらかじめ設定されたコース(半径2.5km〜3km)を自動操縦で約10分間周回飛行し、機体下部に搭載した高精度静止画カメラが河川などの様子を撮影しました。上空から撮影した画像は、車や人の姿などはっきりと写っており、評価に訪れていた防災担当者からも高い評価を受けていました。JAXA石川氏は、「飛行実験を無事に終了することができたことに対して、感謝している。自然災害が多発する日本において、この無人機が活躍できるよう、実験成果を広めていきたい。」を語っていました。


先進形態VTOL無人機飛行実験
- 実験日:2012年10月15日〜26日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、大樹町多目的航空公園滑走路において、「先進形態VTOL無人機飛行実験」を行いました。この実験は、翼が可動する無人機を使用し、離着陸時はヘリコプターのように離着陸し、飛行中に翼を動かし飛行機のように飛行する無人機実験です。今回の実験では、QTW (4発ティルト翼)長距離技術実験機の完全遷移(垂直離陸から飛行機モードまで)の飛行実証に成功し,姿勢制御則の有効性確認や機体特性に関するデータを取得することができました。今後は,長距離飛行のための推進系技術や誘導・航法技術に関してさらに研究を進め,飛行実験による評価・実証を実施していく予定です。


小規模飛行実験
- 実験日:2012年10月4日〜12日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、大樹町多目的航空公園滑走路において、「小規模飛行実験」を行いました。将来の再使用宇宙輸送における効率的で信頼性の高いシステムを開発するため、誘導制御技術の研究を目的として、平成23年度から実施おり、大樹町での今年度2度目の実験となりました。今回の実験では、新しい誘導制御技術を実際の飛行に適用するステップとしての飛行実験を行いました。新しい誘導制御技術によって、実験機の運動を予測しながらの制御や風の影響を考えながら目的経路への飛行を改善する技術などを試験しました。今年度行った実験結果を基に、更なる技術改良が進められています。

災害用ヘリ離着陸訓練
- 実験日:2012年10月22日
- 実験機関:陸上自衛隊
- 実験内容:平成24年10月22日(月)に陸上自衛隊が離着陸訓練を行いました。この訓練は、災害等が起きた場合に、大樹町多目的航空公園に緊急離着陸することを想定した訓練でした。陸上自衛隊のヘリ(UH-1J)が10時10分に大樹町多目的航空公園内の滑走路に着陸し、5分後に離陸しました。その後、浜大樹を周回し、帯広駐屯地へ戻りました。

自律飛行ロボットの飛行制御実験
- 実験日:2012年9月22日〜10月1日
- 実験機関:電気通信大学 田中研究室
- 実験内容:電気通信大学田中研究室では、昨年度・今年4月の実験に引き続き、「自律飛行ロボットの飛行制御実験」を実施しました。今回の実験では、新しく構築した制御システムの飛行実験と、新規に追加した機能である自動離着陸システムの動作実験を行いました。天候にあまり恵まれなかったようですが、十分なデータをとることができたようです。

小型無人機飛行実験
- 実験日:2012年9月15日〜29日
- 実験機関:JAXA無人機・未来型航空機チーム
- 実験内容:JAXA無人機・未来型航空機チームは、SAFE-1型機(重量:約5kg、翼長:約2m、飛行速度:7~25m/s)を使用した「小型無人機飛行実験」を実施しました。今年3回目となる本実験では、秋に予定されている歴舟川上流で災害を想定した飛行実験に向けて、飛行プログラムの確認などを行いました。

再突入観測装置「i-Ball」再突入通信実験
- 実験日:2012年9月14日
- 実験機関:(株)IHIエアロスペース(以下「IA」)・JAXA
- 実験内容:IA及びJAXAは、平成24年9月14日に再突入観測装置「i-Ball」再突入通信実験を行いました。7月21日に種子島宇宙センターから打ち上げられた「HTV3(こうのとり3号機)」に搭載されていた「i-Ball」。国際宇宙ステーションでのミッションを終えた「HTV3」が大気圏に再突入・破壊される様子の取得を目的として、搭載されました。9月13日に国際宇宙ステーションから放出された「HTV3」は、9月14日14:27頃に大気圏に再突入しました。その後、「HTV3」から放出された「i-Ball」が「HTV3」の燃え尽きる様子などを撮影し、南太平洋上に落下しました。その後、南太平洋上の「i-Ball」からのデータ受信を大樹町多目的航空公園の滑走路で行い、データの正常受信に成功しました。今後、データが解析され、「HTV」地球帰還の研究開発などに役立つこととなります。この快挙は、全国ニュースでも報道され、開発者であるIA宇宙技術部森崎浩武主幹の開発ドキュメントが9月23日の「夢の扉+」(TBS)で放送されます。また、「i-Ball」は、大樹町で落下試験・海上試験など数々の実験を実施しており、「「i-Ball」が育ったまち」として、今後も協力していきます。


大気球実験(地上試験)
- 実験日:2012年9月7日
- 実験機関:JAXA大気球実験室
- 実験内容:JAXA大気球実験室は、2012年9月7日に大樹町多目的航空公園内のJAXA大樹航空宇宙実験場にあるJAXA格納庫及び屋外で「大気球地上試験」を実施しました。今年度に改良したスプール台車(打上げ前、気球の頭部を押さえる台車)の作動試験として、国内最大級の気球(B500)を使用して、実験を行いました。今回は、地上試験のため、放球はされず、気球立上げ後に徐々にヘリウムガスを抜き、回収されました。なお、この国内最大級の気球は、フィルムだけの重量で「900kg」、気球の全長は「約150m」、上空での満膨張時に直径100m以上にもなる大型気球です。


小型無人機飛行実験
- 実験日:2012年7月25日〜31日
- 実験機関:JAXA無人機・未来型航空機チーム
- 実験内容:JAXA無人機・未来型航空機チームは、SAFE-1型機(重量:約5kg、翼長:約2m、飛行速度:7~25m/s)を使用した「小型無人機飛行実験」を実施しました。今年2回目となる本実験では、秋に予定されている歴舟川上流で災害を想定した飛行実験に向けて、飛行プログラムの確認などを行いました。

CAMUI型ロケット・SNS製液体ロケット 打上実験
- 実験日:2012年7月28日
- 実験機関:HASTIC、(株)カムイスペースワークス、SNS(株)
- 実験内容:7月28日(土)8:05にCAMUI-500Pが打ち上げられました。過去最大規模の推力エンジンを搭載したこの機体は、爆音とともに打ちあがり、高度7,400mに到達しました。2007年8月に記録した高度3,500mを大幅に上回る記録更新となりました。また、本実験の目的としていた「超音速飛行」「機体海上回収実験」ともに成功しました。また、11:56には、SNS製の液体ロケットが打ち上げられました。発射後、風見効果により、南方向に機首を振り、水平飛行となってしまったことから、途中でエンジン停止のコマンドを伝送しました。コマンド受信したという応答が届いた直後から、通信が途絶し、機体は回収できませんでした。両機体ともに、本実験で得られたデータを解析し、今後、エンジンの大型化などを目指し、開発が進められます。


船舶用レーダーの型式検定試験
- 実験日:2012年7月16日〜27日
- 実験機関:NICT電磁波計測研究所
- 実験内容:NICT電磁波計測研究所は、大樹町多目的航空公園滑走路において、船舶用レーダーの型式検定試験を実施しました。滑走路脇の緑地帯にレーダーや機材等を配置し、1週間程度計測試験を行いました。

小規模飛行実験
- 実験日:2012年7月5日〜13日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、大樹町多目的航空公園滑走路において、「小規模飛行実験」を行いました。この実験は、将来の再使用宇宙輸送における効率的で信頼性の高いシステムを開発するため、誘導制御技術の研究を目的として、平成23年度から実施されています。今年度は、新しいソフトウェアを搭載して飛行実験を行いました。滑走路周回飛行で得られたデータを解析し、今後の研究に活かされます。

第8回マイクロライト日本選手権大会IN大樹町
- 開催日:2012年6月22日〜24日
- 主催:NPO法人日本マイクロライト航空連盟
- 開催内容:NPO法人日本マイクロライト航空連盟が主催する「第8回マイクロライト日本選手権大会IN大樹町」が平成24年6月22日〜24日に開催されました。道内での開催は、15年ぶりであり、大樹町では初めての開催となりました。22日は、練習飛行とレセプションが行われました。予定では、23日に「周回・着陸精度競技」、24日に「航法精度競技」が行われる予定でしたが、悪天候・視界不良により23日に「周回・着陸精度競技」のルールを一部変更して実施しました。10機18名の参加者が競技に出場し、熟練された技を披露してくれました。天候に恵まれませんでしたが、3日間合計でのべ約320名が来場し、非常に盛り上がった大会となりました。また、地元の方も運営に協力しており、競技主催者・参加者から、とても感謝されていました。



大気球実験(地上試験)
- 実験日:2012年6月12日
- 実験機関:JAXA大気球実験室
- 実験内容:JAXA大気球実験室は、2012年6月12日に大樹町多目的航空公園内のJAXA大樹航空宇宙実験場にあるJAXA格納庫内で「大気球地上試験」を実施しました。JAXA格納庫内で気球を膨らませ気球上部に取り付けられた「ガス排気弁」の作動試験を実施しました。


大気球実験(B12-02)
- 実験日:2012年6月9日
- 実験機関:JAXA大気球実験室
- 実験内容:JAXA大気球実験室は、2012年6月9日に「B12-02」実験を実施しました。この実験は、通常の大気球実験で使用される「ゼロプレッシャー気球」と気球内圧を高く保つことによって長時間飛翔することが出来る「スーパープレッシャー気球」を組み合わせることによって、より長時間の飛翔・調査を可能とする「タンデム気球」の性能試験を目的として実施しました。午前3時35分に大樹町多目的航空公園内のJAXA大樹航空宇宙実験場から放球された気球は、高度30.4kmの地点で気球の試験を行い、その後、海上に緩降下し、地元漁業者の方々の協力によって、無事回収されました。JAXA研究者は、「今回明らかになった課題を解決し、タンデム気球開発を続けていきたい。」とコメントしていました。


大気球実験(B12-01)
- 実験日:2012年6月3日
- 実験機関:JAXA大気球実験室
- 実験内容:JAXA大気球実験室は、2012年6月3日に「B12-01」実験を実施しました。午前4時55分に大樹町多目的航空公園内のJAXA大樹航空宇宙実験場から放球された気球(満膨張体積100,000m3、直径63m)は、放球3時間10分後に、高度31.2kmに達し、上空での観測実験を行いました。この気球の観測実験は、「GAPS(ギャップス)」と呼ばれる実験プロジェクトの本格観測(数年後に南極で実施する予定)に向けた、プロトタイプの性能評価を目的として実施しました。「GAPS」実験とは、日米国際共同(大樹町で初)で推進されているプロジェクトであり、地球に降り注いでいる宇宙線の中にわずかに含まれている「反粒子」の探査をすることが目的のプロジェクトです。上空での観測では、様々なデータを取得することに成功し、今後の本格観測に向けた測定器の開発などに役立てられます。なお、気球は、観測実験後に、海上に緩降下させ、地元漁業者の方々の協力によって、無事回収されました。


小型無人機飛行実験
- 実験日:2012年5月21日〜6月1日
- 実験機関:JAXA無人機・未来型航空機チーム
- 実験内容:JAXA無人機・未来型航空機チームは、SAFE−1型機(重量:約5kg、翼長:約2m、飛行速度:7~25m/s)を使用した「小型無人機飛行実験」を実施しました。今年で3年目となるこの実験は、昨年度に自動発進〜自動撮影〜自動着陸のシステム構築や機動性の向上を確認しました。今年度の実験では、複数地上局での運用性や安全性の確認、耐風性の確認などを目標とし、実験を行いました。また、秋の実験では、歴舟川上流で災害を想定した飛行実験を予定しています。この無人機は、河川等の災害時に災害の起きている箇所まで飛行し、自動撮影や状況把握をすることによって、「初動監視」することを目的として開発がすすめられています。


JAXA大樹航空宇宙実験場における平成24年度実験計画等説明会
- 開催日:2012年5月30日
- 開催機関:JAXA
- 開催内容:JAXA大樹航空宇宙実験場の大気球管制棟において、平成24年度実験計画及び平成23年度実験成果報告に係る説明会が行われました。会場には、報道機関3社が出席し、東京都調布市にテレビ会議システムを通じて、中継されました。大気球実験に関しては、JAXA大気球実験室吉田室長から説明・報告があり、平成24年度は、大小あわせて6機の放球が予定されています。また、飛行系実験に関しては、JAXA研究開発本部飛行技術研究センター柳原センター長から説明・報告があり、平成24年度は、無人機の実験やVTOL無人機、飛行技術支援システム(SAVERH)の実験などが行われます。

「i-Ball」浮遊・着水・通信実験
- 実験日:2012年4月27日〜5月8日
- 実験機関:(株)IHIエアロスペース
- 実験内容:(株)IHIエアロスペースでは、昨年2月に実施した「i-Ball」落下実験に続き、大樹沖での浮遊実験・着水実験及び大樹町多目的航空公園と石垣島との間の通信実験を行いました。浮遊実験では、「i-Ball」を大樹沖に浮遊させ、画像データ・姿勢データなどを衛星回線を用いて伝送する実験を行いました。着水実験では、海面から5mの高さから「i-Ball」を落下させ、着水衝撃を計測する実験を行いました。全ての実験において、良いデータが取れたようであり、今後の開発に生かされる予定です。


自律飛行ロボットの飛行制御実験
- 実験日:2012年4月27日〜5月7日
- 実験機関:電気通信大学 田中研究室
- 実験内容:電気通信大学田中研究室では、昨年度の実験に引き続き、「自律飛行ロボットの飛行制御実験」を実施しました。今回の実験では、主に飛行方向の自律制御実験を行い,昨年度に実現した飛行高度の自律制御と組み合わせて,完全な自律飛行を目指し、1kmの完全自律飛行を実現しました。今後、更なるシステムの改良を行い,次回の実験ではより高精度な自律飛行の実現を目指すこととしています。


2011年度の実験実績等
小型有翼実験機および高信頼性飛行制御システムの開発
- 実験日:2012年3月1日〜6日
- 実験機関:金沢大学、大阪府立大学、横浜国立大学
- 実験内容:金沢大学、大阪府立大学及び横浜国立大学は、将来宇宙輸送系に向けた誘導制御技術研究「小型有翼実験機および高信頼性飛行制御システムの開発」に関する実験を町内美成地区の原野で実施しました。全長約80cm、全幅約50cm、重量約0.8kgの発泡スチロール製機体を係留バルーンで高度約100mまで釣り上げた後、落下・滑空させる実験を合計23回行い、様々なデータを取得しました。この実験は、JAXAの依頼を受け、3大学が連携し実験を行っています。得竹准教授(金沢大学)のグループは、これまで大樹町での実験を5回行っており、今回が6回目の実験となりました。得竹准教授は、「大樹町には非常に実験しやすい環境があります。これからも、この環境を生かして積極的に飛行実験を行っていきたいです。」と語っていました。


東海大学 学生ロケットプロジェクト
- 実験日:2012年2月16日〜22日
- 実験機関:東海大学 学生ロケットプロジェクト
- 実験内容:東海大学学生ロケットプロジェクト(神奈川県)は、2004年3月からほぼ毎年、自作のハイブリッドロケット打上げを大樹町で実施しています。今回は、昨年3月以来8度目の実験で、2機(26号機、27号機)のロケット打上げを予定し、2月15日から24名が来町しました。17日と18日に1機目(26号機)の打ち上げを予定してましたが、機体不具合などのため、打上中止となりました。19日の午後4時40分に27号機を打ち上げ、到達高度416mに達しました。その後、パラシュートを開傘し、無事着地しました。翌20日に射点から120mの地点に機体を発見し、無事回収しました。データを解析し、今後の研究活動に生かしていきます。

CAMUI型ロケット打ち上げ実験(2)
- 実験日:2011年12月16日〜12月17日
- 実験機関:NPO法人北海道宇宙科学技術創成センター他
- 実験内容: 12月16日17時00分にCAMUI型ロケット1機目(推力90kgf)が打ち上げられました。満天の星空の下で打ち上げられ、到達高度520mでパラシュートを開傘し、地上に降下しました。赤・青・緑のLEDをまとった機体は、とてもきれいであり、HASTIC伊藤理事長は、「技術というよりも、芸術であった。」と語っていました。12月17日8時30分には、CAMUI型ロケット2機目(推力200kgf)が打ち上げられました。17日の最低気温は、-20℃...。気温の上昇を待ってから、打ち上げられました。機体は真っ直ぐに高度836mに達し、無事に回収されました。その後、10時45分にCAMUI型ロケット3機目(推力200kgf)が打ち上げられました。過去最大規模の機体(全長4.3m、重量40kg)は、高度695mまで打ち上げられ、こちらも無事に回収されました。(株)カムイスペースワークス代表取締役の植松氏は、「今回の実験がすべて成功したことによって、一つ一つの技術がようやく確立し始めたことが確認できた。いよいよこれから大規模な実験をする準備ができた。大樹町が「宇宙の入口」になっていることは、非常に嬉しく思っている。」と語っていました。また、北海道大学永田教授は、「全ての実験がうまくいき、非常に実りのある実験となった。今後、改良して、さらに高い高度を目指していく。」と語っていました。12時00分には、SNS(株)開発ロケットエンジンを搭載した液体燃料ロケット「ゆきあかり」(推力100kgf)が打ち上げられました。機体は、真っ直ぐに打ち上げられ、高度1001mまで到達し、パラシュートを開傘。その後、徐々に降下し、無事に回収されました。SNS(株)の牧野氏は、「宇宙へ到達するには、大型化が必要となるが、そのためには、安全性が重要となる。今回の実験では、空中の状態を知ることや、地上からの指令のよる姿勢制御などを成功することができ、安全性が高まった。今後は、数キロメートルを目指して、開発・改良を進めたい。」と語っていました。
※左から、「CAMUI1号機(photo by A. Mutou/HASTIC)」「CAMUI2号機」、「CAMUI3号機」、「ゆきあかり」




係留気球を用いた通信実験
- 実験日:2011年11月21日〜12月12日
- 実験機関:(株)スカイプラットフォーム
- 実験内容:(株)スカイプラットフォームでは、係留気球を用いた通信実験を行いました。長さ20m・直径7.5mの飛行船型気球と長さ8mの小型飛行船型気球を高度最大108mまで上昇させ、約1時間滞空させた実験を行いました。実験当日は、天候も快晴で、無風状態という最高の条件での実験となりました。


飛行音源探査計測試験
- 実験日:2011年11月7日〜30日
- 実験機関:JAXA航空プログラムグループ国産旅客機チーム
- 実験内容:JAXA航空プログラムグループ国産旅客機チームでは、ミツビシ・エアクラフト・インターナショナル社製のMU-300型ビジネスジェット機を使用した、飛行音源探査計測試験が行いました。多目的航空公園滑走路上の直径50mの範囲に198本のマイクを設置し、その上をジェット機が繰り返し飛行し、騒音の音源探査をする実験です。1フライト平均18回の周回飛行を繰り返し、最低高度で60mの低空で滑走路上を飛行しました。天候にも恵まれ、良いデータが取れたようです。
※左から、「滑走路に設置されたマイク」、「滑走路通過」、「MU-300」



飛行ロボット自立制御システムの開発
- 実験日:2011年11月4日〜9日
- 実験機関:電気通信大学 田中研究室
- 実験内容:電気通信大学田中研究室では、「パラグライダ型飛行ロボット」を利用した自立制御システムの開発研究を行いました。大樹町多目的航空公園を使用しての実験は初めてであり、今実験では約1週間で自立制御による高度飛行と旋回飛行を実現できました。今回の実験結果を基にシステムの改良を行い、来年は飛行距離の延長とビジョンによる情報収集タスク実験の実施を目指します。



視覚情報支援技術評価実験
- 実験日:2011年10月28日〜11月10日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、視覚情報支援技術評価実験を行いました。この実験では、JAXAの実験用ヘリコプタ(MuPAL-ε)を使い、ヘリコプタによる災害救援や捜索救助を、夜間や悪天候時にも安全に実施できるようにするために、パイロットに各種飛行情報(赤外線カメラ・地形データなど)を見せる方法を開発・実験しています。

次世代運航システムDREAMS
- 実験日:2011年10月25日〜11月7日
- 実験機関:JAXA運航安全チーム
- 実験内容:JAXA運航安全チームは、次世代運航システムDREAMS(Distributed and Revolutionary Efficient Air-traffic Management System)の低騒音運行試験を行いました。
計測ライダ飛行試験
- 実験日:2011年10月14日〜21日
- 実験機関:JAXA運航安全チーム
- 実験内容:JAXA運航安全チームは、計測ライダ飛行試験を行いました。従来までは、乱気流検知用としてライダを開発していましたが、今年は対気速度計測用として開発しました。天候にも恵まれ、良い実験データがとれたようです。
JAXA先進形態VTOL無人機飛行実験(2)
- 実験日:2011年10月13日〜21日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、今年2度目となる先進形態VTOL無人機飛行実験を行いました。繰り返し飛行を行い、飛行姿勢や飛行状況の実験を行いました。
JAXA小型無人機飛行実験(2)
- 実験日:2011年10月5日〜21日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、今年2度目となる災害監視無人機システム小型無人機飛行試験を実施しました。この飛行試験では、ハイビジョンカメラやデジタルカメラなどを搭載し、災害監視用としての動作試験や、自動離着陸・航行の実験を実施しました。



無人飛行船実験(2)
- 実験日:2011年10月3日〜2011年10月14日
- 実験機関:神戸大学大学院工学研究科
- 実験内容:神戸大学大学院工学研究科機械工学専攻深尾隆則准教授ら7名は、自律型飛行船ロボットによるレスキュー活動支援システムの構築を目指し、全長約12mの無人飛行船を用いて実施しました。今年度2回目となるこの実験では、飛行を繰り返し、様々なデータ収集などを行いました。 また、飛行船実験と並行して、ティルトロータ型飛行ロボットの飛行試験も行いました。夏は、不具合で実施できませんでしたが、今回は飛行実験を行うことができました。



JAXA大気球実験(第2次実験)
- 実験日:2011年8月30日、2011年9月14日
- 実験機関:JAXA大気球実験班
- 実験内容:JAXA大気球実験班は、8月30日(火)4時40分に、小型実験用再突入システムの大気球からの落下試験を目的としたB11-04実験として、平成23年度第二次気球実験の初号機を連携協力拠点 大樹航空宇宙実験場から打ち上げました。この気球は満膨張体積100,000m3の大気球で、およそ毎分300mの速度で上昇し、2時間20分後に高度37kmに達したところで、アポロ型カプセルを気球から投下しました。カプセルは遷音速に達した後、パラシュートを開傘し海上に緩降下しました。なお、気球及び制御機器部は、8時25分までに回収船によって回収されました。この実験は、アポロ型カプセルの遷音速域での動的不安定性の挙動についての基礎的データ収集するとともに、リアクションコントロールジェットにより制御することを目的としています。今後、データの解析を行います。また、9月14日(水)6時12分には、超薄膜高高度気球の飛翔性能試験BS11-06実験が行われ、平成23年度第二次気球実験が終了しました。
詳しくはJAXA<トピックス>(B11-04)、JAXA<トピックス>(BS11-06)
※左から、「B11-04放球前」、「B11-04放球時」、「BS11-06放球前」、「BS11-06放球時」




「超小型衛星用地上局パラボラアンテナ」開所式
- 実験日:2011年8月24日
- 実験機関:次世代宇宙システム技術研究組合ほか
- 実験内容:旧大樹駅舎付近の土地に次世代宇宙システム技術研究組合などが建設を進めてた「超小型衛星用地上局パラボラアンテナ」が完成し、開所式が行われました。式典は、大樹町議会議員や関係団体幹部・近隣住民などが出席しました。中須賀真一東京大学教授の挨拶から始まり、伏見悦夫大樹町長の来賓挨拶、徳長政光十勝総合振興局長の来賓祝辞、山口耕司次世代宇宙システム技術研究組合代表理事の施設説明などが行われました。山口代表理事の説明の中では、パラボラアンテナのデモンストレーションも行われました。今後、超小型衛星(5基打ち上げ予定)のデータ受信施設として活用されます。
※左から、「夕焼けとアンテナ」、「中須賀真一教授」、「式典風景」



無人飛行船実験
- 実験日:2011年7月25日〜8月5日
- 実験機関:神戸大学大学院工学研究科
- 実験内容:神戸大学大学院工学研究科機械工学専攻深尾隆則准教授ら7名は、自律型飛行船ロボットによるレスキュー活動支援システムの構築を目指し、全長約12mの無人飛行船を用いて実施しました。本年で6年目となるこの実験では、天候にも恵まれ、離着陸、飛行を繰り返し実施しました。


CAMUI型ロケット打ち上げ実験
- 実験日:2011年7月23日
- 実験機関:NPO法人北海道宇宙科学技術創成センター他
- 実験内容:7月23日早朝にCAMUI型ロケット(推力90kgf級機体)とSNS(株)開発ロケットエンジンを搭載した液体燃料ロケット「なつまつり」が打ち上げられました。打ち上げ当日は、良好な気象条件に恵まれ、6時15分頃に、CAMUI型ロケット1号機が打ち上げられ、到達高度は1,356mに達しました。次に、SNS(株)の「なつまつり」が打ち上げられ、到達高度1,500m(推定)に達しました。最後に、CAMUI型ロケット2号機が打ち上げられ、到達高度は1,300m(推定)に達しました。なお、3機とも海上に向けて打ち上げられ、パラシュートにより海上へ落下し、大樹町漁業協同組合の皆様のご協力を得て、無事に回収に成功しました。CAMUI型ロケットは、打ち上げの目的(無線伝送によるデータ取得・フロート搭載による機体の海上保持・ビーコン探索など)を無事に達成できました。また、SNS(株)の「なつまつり」に搭載したハイビジョンカメラでは、打ち上げから海上落下までの映像がはっきりと撮影されていました。
※写真1 CAMUI型ロケットの打ち上げ、写真2 回収後の機体説明を行うCSW代表取締役 植松努氏、写真3 回収後の機体



トライククラブ空界
- 実験日:2011年7月21日〜8月20日、9月7日〜9月17日
- 実験機関:トライククラブ空界
- 実験内容:トライククラブ空界(東京都)代表藤丸昌樹氏他は、多目的航空公園が整備された直後から毎年やってきてフライトを楽しんでいます。滞在中、天気が良い日が少なかったですが、今年は新しい機体を持ち込み、フライトを楽しんでいました。

JAXA小型無人機飛行実験
- 実験日:2011年7月11日〜21日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、災害監視無人機システム小型無人機飛行試験を実施しました。この飛行試験は、災害監視無人機システム研究開発の一環で、固定翼無人機SAFE−F1(全長1.5m、約全幅2.3m、重量約4kg)を持込み、離陸、着陸を繰り返しました。


JAXA先進形態VTOL無人機飛行実験
- 実験日:2011年6月18日〜7月8日
- 実験機関:JAXA飛行技術研究センター
- 実験内容:JAXA飛行技術研究センターは、6月18日から7月8日に先進形態VTOL無人機飛行実験を行いました。本年の実験は、昨年までの機体から一回り大きな新型機体を導入し、合計7日間の飛行実験を行いました。


JAXA大気球実験「B11−02実験」(第1次実験)
- 実験日:2011年6月8日
- 実験機関:JAXA大気球実験班
- 実験内容:JAXA大気球実験班は、6月8日(水)5時4分に、エマルションハイブリッド望遠鏡による宇宙ガンマ線の観測を目的としたB11-02実験として、連携協力拠点 大樹航空宇宙実験場から打ち上げました。この気球は満膨張体積100,000m3の大気球で、高度34.7kmで水平浮遊状態に入り、その後指令電波で切り離し9時43分までに回収船によって回収されました。この実験は、原子核乾板(エマルション)と呼ぶ観測器によって宇宙から飛来するガンマ線をとらえることを目的としています。回収されたエマルションを今後現像し、検証します。
詳しくはJAXA<トピックス>



JAXA大気球実験「BS11−02実験」(第1次実験)
- 実験日:2011年6月1日
- 実験機関:JAXA大気球実験班
- 実験内容:JAXA大気球実験班は、超小型タンデム気球の飛翔性能試験を目的としたBS11-02実験として、今年度初号機を6月1日(水)1時23分連携協力拠点 大樹航空宇宙実験場から放球しました。この気球は、二つの異なる気球を組み合わせ、昼夜で高度を変えながら長時間の飛翔を実現するシステムの原理実証などを目的に行われ、5時17分太平洋上に降下しました。
詳しくはJAXA<トピックス>

問い合わせ先
| 問い合わせ先 | 大樹町役場企画商工課航空宇宙推進室推進係 |
|---|---|
| 住所 | 北海道広尾郡大樹町東本通33 |
| 電話 | 01558-6-2113(直通) |
| FAX | 01558-6-2495 |
| メール | uchu@town.taiki.hokkaido.jp |
迷惑メール対策のため、@(アットマーク)を全角で表示しております。
メールアドレスをコピーアンドペーストする場合は、@を半角に変更してください。
Adobe Readerをインストールするには
PDFファイルをご覧になるには、ご使用のパソコンに閲覧ソフトウェアのAdobe Readerがインストールされている必要があります 。
Adobe Readerは無料で利用できます。下のボタンを押してソフトウエアをダウンロードし、インストールしてください。
![]()
Adobe Readerのご利用に必要なパソコンの環境については、こちらをご覧ください。